标签:
“缝合”这一术语表示利用软件,以电子方式将多个影像连接在一起制成较大影像。当以数字方式缝合全景影像时,拍摄的影像边缘必须完全重合,歪斜的相机会使 最终影像的接缝不整齐。如果所有照片均以相同的曝光和白平衡设定拍摄,则最终影像效果会非常好,否则会出现亮度和色彩接缝。虽然这可使用软件纠正,但是在 拍摄时就纠正,效果将会更好。有些COOLPIX相机具有全景助理场景模式,可自动调节曝光和白平衡,如果没有此模式,则需要手动调整这些设定。
创建远距离物体的全景影像相对容易,以下是使用ArcSoft的“PanoramaMaker”软件将四个独立影像缝合在一起的影像例图。只要在用相机拍照时将单个影像很好地对齐(务必使相机与地面保持水平),软件即可创建完美的全景影像。

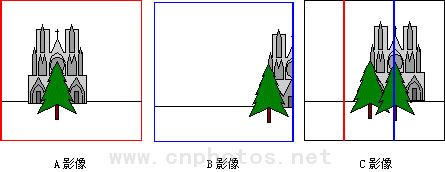
但是,拍摄前景和背景中物体的全景影像非常困难。为了消除视差错误,必须找出其光学中心(或“节点”)。以下例图显示拍摄前景和背景物体时出现的视差错误(数码相机固定在三脚架上,并从相同位置拍摄A和B影像。)。
· A影像 - 相机朝向背景中的教堂,前景中有一棵树。
· B影像 - 相机在三脚架上转向左侧,因此只能看到教堂的左侧,但是前景中的树“似乎”相对于教堂的位置发生移动。
· C影像 - 使用全景处理软件以电子方式缝合影像,但由于前景中的树“似乎”相对于教堂的位置发生移动,所此它出现了两次。
此错位现象叫作“视差错误”,当将影像缝合在一起时,缝合影像的全景软件将无法纠正此错误。
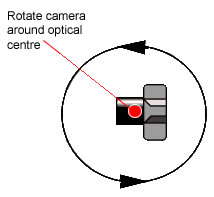
要纠正此错误,必须沿镜头的光学中心(或节点)旋转相机。镜头的节点是光路径在聚焦于相机感光器或胶片平面之前,在镜头中汇聚的一点。以三脚架插座为中心旋转相机几乎肯定会导致视差错误,因此需要先找到节点,然后固定相机,再以该节点为中心旋转相机。
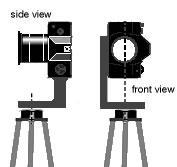
可借助全景云台将相机固定在三脚架上,这些云台可以固定相机,允许位置上的调整,并沿相机/镜头的光学中心旋转相机/镜头。全景云台制造商的例子有Kaiden和Manfrotto。
节点可认为是从前端镜头表面到镜头光学中心的度量,尼康不公布此信息,但可以通过以下步骤找到近似的节点。在使用全景云台进行正确定位时,请确定三脚架是固定的,仅相机可移动。
1.将相机安装在中央 确定相机镜头正好在旋转点的上方,这一点可从前端观看安装在三脚架上的相机来进行检查。
2.调节视差错误 要找到并纠正视差错误,请使用相机、带全景云台的三脚架、一张桌子和四支笔(最好使用可以自行竖立起来的“麦克”笔)进行下述操作。如例图中所示放置四支 笔。用全景云台将相机安装在三脚架上,使最近和最远的笔可同时在相机的LCD显示屏(或取景器,如果使用的是SLR)上看到。前面的笔应比后面的笔靠前。
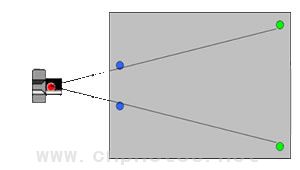
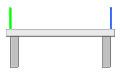
从上面和旁边观看桌子时所显示笔的位置
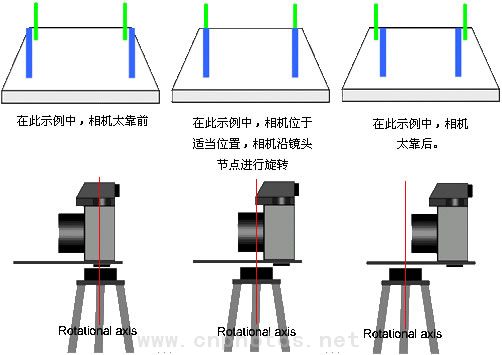
使相机LCD显示屏或SLR取景器与笔成一直线观看,然后从左向右平移相机以使笔在相机LCD显示屏中从左侧移至右侧,在平移相机时注意各支笔之间的相对移动。用全景云台将相机后移或前移,直到在平移时各笔之间的相对移动消失。
3.将相机调水平 使用三脚架上的水平仪进行调校,如果没有水平仪,请使用一个小的附加水平装置。
在设计全景软件时,软件设计公司可能需要特定的尼康镜头数据以解决镜头失真,但尼康无法提供此信息,因为这属于公司机密。
注意: 本网站上涉及的不属于尼康品牌的产品,均由其它制造商根据其产品的附加条件和条款进行独家供应和支援。尼康不能对第三方产品提供支援或发表意见。
标签:
原文地址:http://www.cnblogs.com/shakin/p/5570760.html