标签:
设计PID控制器,增加了积分和微分环节:
algorithm
error := command.signal[1] - feedback.signal[1];
i_error := i_error+ error;
d_error := error - pre(error);
pout := Kp * error + Ki * i_error + Kd * d_error;
选择参数:
kp=6
ki=0.1
kd=20
parameter Real Kp=6;
parameter Real Ki=0.1;
parameter Real Kd=20;
结果如下:
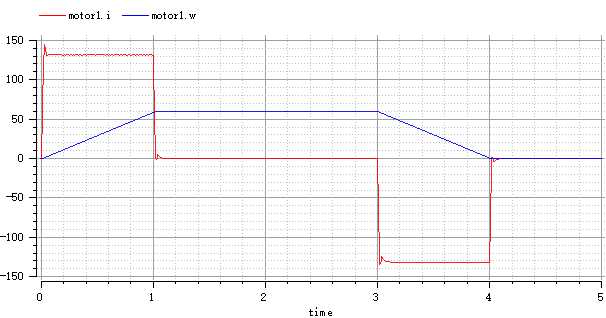
计算得到超调量Mp约为22%,响应时间约为0.12s。
响应性能较好。
标签:
原文地址:http://www.cnblogs.com/yujin13/p/5571649.html