标签:
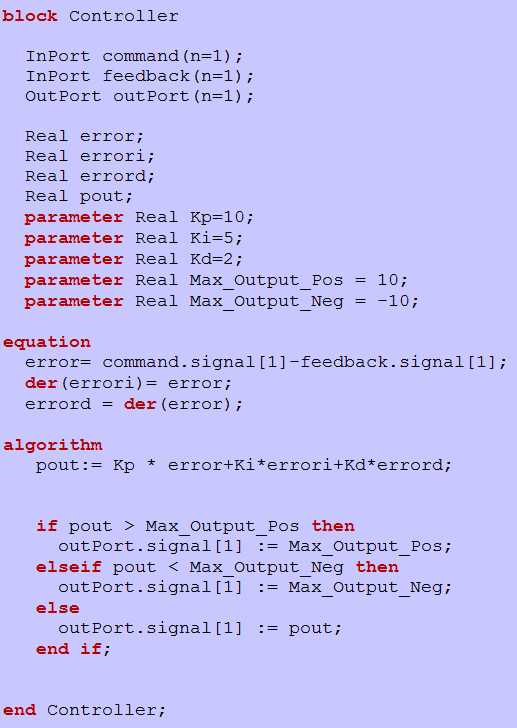
当然首先对速度进行PID调节,讲速度换的反馈与速度传感器连接
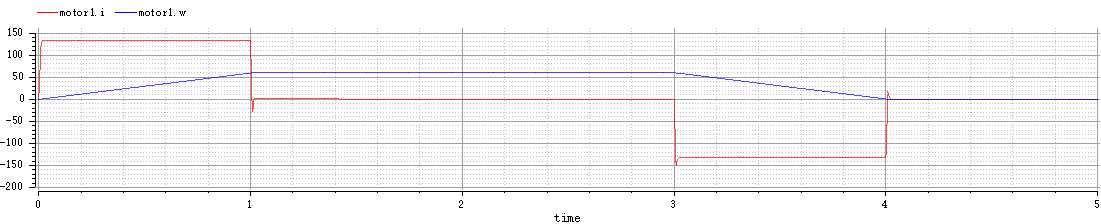
转换时电流仍有一定冲击,但通过Ki和Kd的调整消除了大部分稳态误差,调整了初始上升电流的柔和性
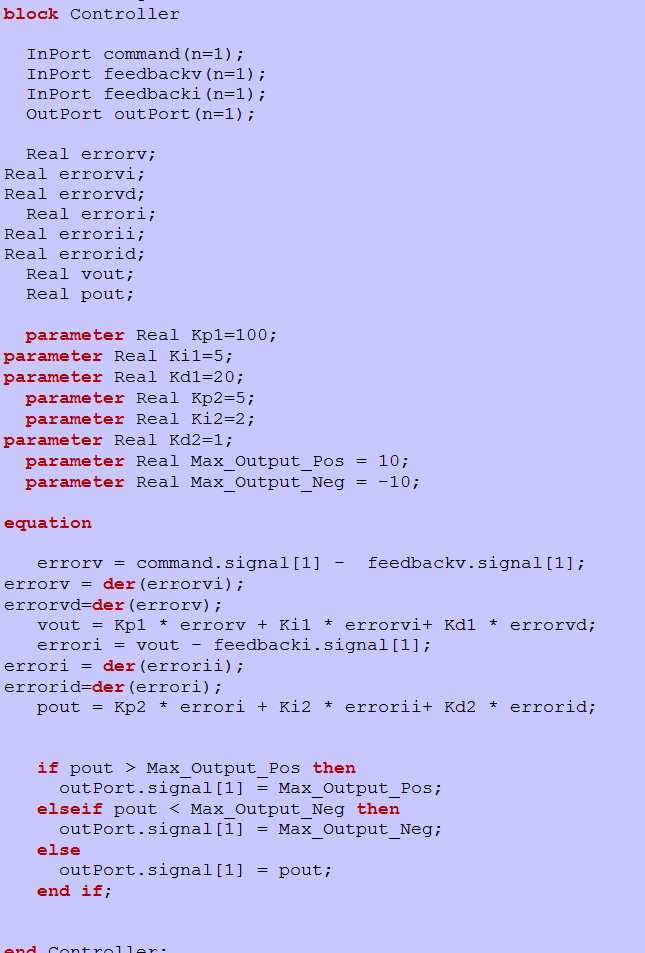
在进行电流环复合调节,同样是PID
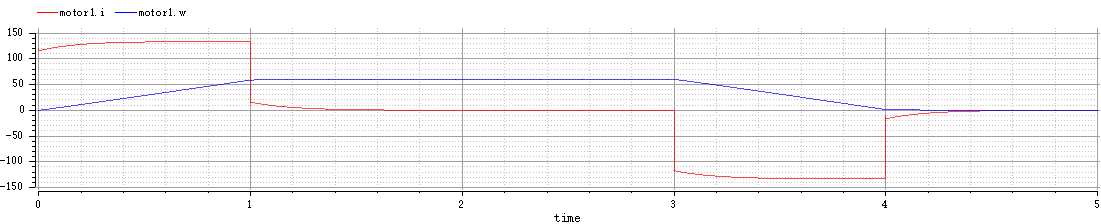
当电流环起相对较小数值起微弱作用时效果较好电流基本无震荡,但转速的线性部分变差
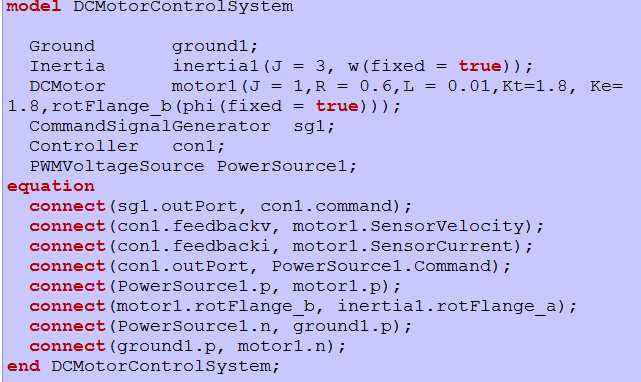
最后的控制系统
电机调速作业
原文地址:http://www.cnblogs.com/yellowstar/p/5585950.html