标签:
1.直流电机模型
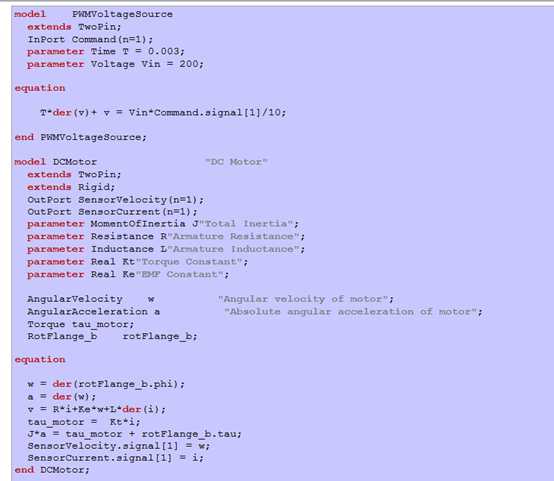

?
2.PID调节参数的作用:
1.比例系数Kp的作用是加快系统的响应速度,提高系统的调节精度。?
2.积分作用系数Ki的作用是消除系统的稳态误差。
3.微分系数Kd的作用是改善系统的动态特性。
?
?
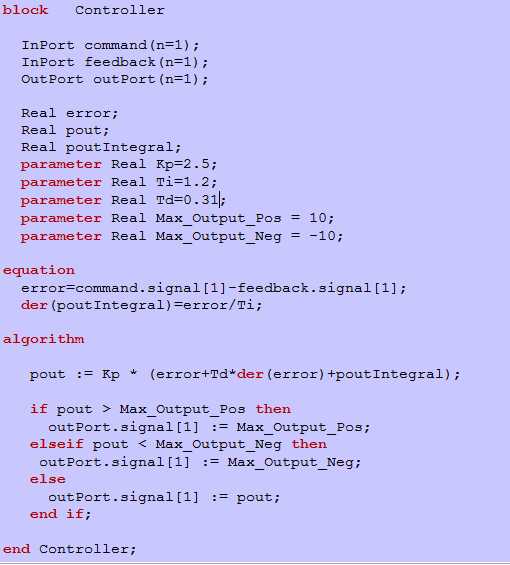
3. 控制函数controller的编写
调试KP,TI,TD的值
Kp=2.5 ti=1.2 td=0.31
4.仿真结果
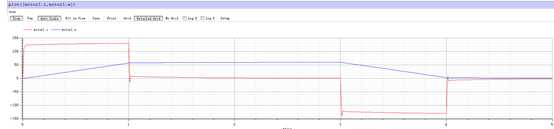
上升时间 tp=0.0282
无超调
标签:
原文地址:http://www.cnblogs.com/cai0422/p/5589622.html