标签:
在3D计算机图形学中,我们经常需要使用多个坐标系,因此我们需要知道如何从一个坐标系转到另一个坐标系。在3D计算机图形学中,点(Point)和向量(Vector)的变换是不同的,所以需要分别讨论。
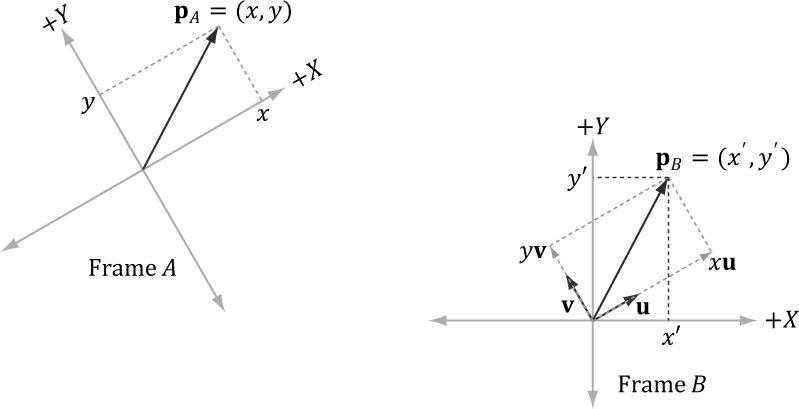
如图所示,有两个坐标系A、B和一个向量p。假设我们已经知道了p在坐标系A下的坐标为pA = (x,y);现在我们要求p在坐标系B下的坐标,pB = (x‘,y‘) 。也就是说,给定一个坐标系下的向量p,如何计算p在另一个坐标系下的坐标呢?
显然,在坐标系A下,p = x*u + y*v;其中u、v为坐标系A下沿着x轴和y轴的单位向量;而在坐标系B下,p = x*uB + y*vB ,其中uB和vB为A坐标系下的x轴和y轴在B坐标系下的向量表示。因此,如果求出uB = (ux,uy),vB = (vx,vy),则可以求出pB = (x‘,y‘)的值。
相应地,将二维情况推广到三维,即可得到:
如果向量pA = (x , y , z),则pB = x*uB + y*vB + z*wB;其中pA为p在A坐标系下的向量表示,pB为p在B坐标系下的向量表示,uB 、vB 、wB分别为A坐标系下的坐标轴x、y、z在B坐标系下的向量表示。
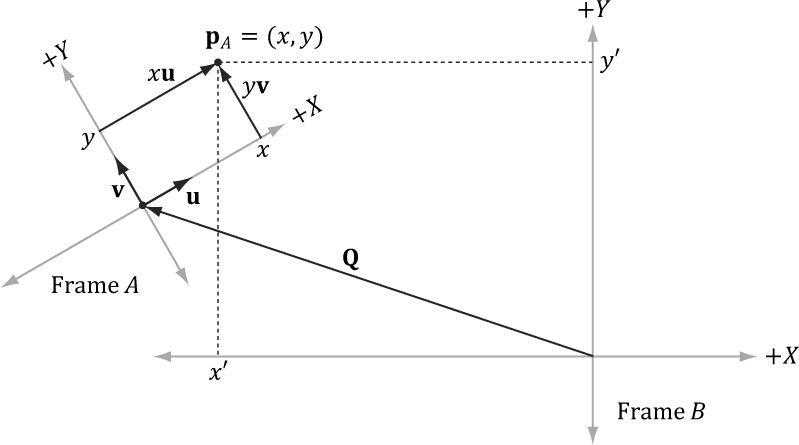
点是需要包含位置信息的,因此,点的变换和向量的变换稍微有些不同。
如图所示,在坐标系A下,点p可表示为:p = x*u + y*v + Q ,其中u、v为坐标系A的坐标轴,Q为坐标系A原点的坐标。而在B坐标系下,点p可表示为:p = x*uB + y*vB + QB ,其中uB和vB为A坐标系下的x轴和y轴在B坐标系下的向量表示,QB为A坐标系下的原点在B坐标系下的坐标表示。因此,我们只要求出uB = (ux,uy),vB = (vx,vy),QB = (Qx,Qy),则可求出点p在B坐标下的坐标表示。
同理,将上述变换推广到三维可得:
如果点pA = (x , y , z),则点pB = x*uB + y*vB + z*wB +QB ;其中pA为p在A坐标系下的坐标,pB为p在B坐标系下的坐标,uB 、vB 、wB分别为A坐标系下的坐标轴x、y、z在B坐标系下的向量表示,QB为A坐标系下的原点在B坐标系下的坐标表示。
结合1和2可得,
对于向量:
(x‘, y‘, z‘) = x*uB + y*vB + z*wB;
对于点:
(x‘, y‘, z‘) = x*uB + y*vB + z*wB + QB。
使用齐次坐标,我们将以上两式统一表示为:
(x‘, y‘, z‘,w‘) = x*uB + y*vB + z*wB + w*QB。
其中,w=0,为向量的坐标变换;w=1,为点的坐标变换。
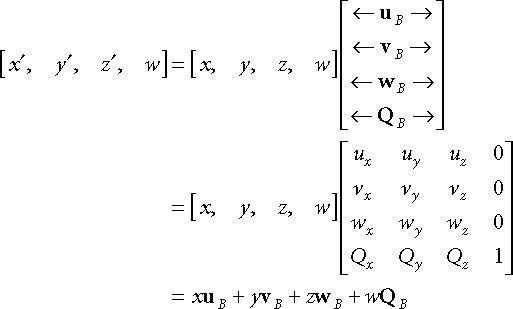
令QB = (Qx ,Qy ,Qz ,1), uB = (ux , uy , uz ,0), vB = (vx ,vy ,vz ,0), wB = (wx , wy , wz ,0),则可得坐标系A到坐标系的变换矩阵为
标签:
原文地址:http://www.cnblogs.com/begodlike/p/5596815.html