标签:
Visual Object Tracking using Adaptive Correlation Filters 一文发表于2010的CVPR上,是笔者所知的第一篇将correlation filter引入tracking领域内的文章,文中所提的Minimum Output Sum of Squared Error(MOSSE),可以说是后来CSK、STC、Color Attributes等tracker的鼻祖。Correlation Filter(以下简称CF)源于信号处理领域,后被运用于图像分类等方面。Correlation包含Cross-correlation和Auto-correlation,在这里我们一般指的就是Cross-correlation。首先看看维基百科上Cross-correlation的定义,假设有ff和gg两个函数(信号),其cross-correlationf?gf?g定义为
其中f∗f∗表示ff的复共轭,correlation的直观解释就是衡量两个函数在某个时刻ττ的相似程度,如下图所示。考虑一个最简单的例子,假设ff和gg的形状一样,但是相差了若干个时刻,那么f★gf★g取得最大值的时候一定是ff和gg对齐的时候(没谁比自己和自己更像了吧…),但因为两者有时间差,所以要取得最大值,就要把其中一个在时间轴上进行平移,所以g(t+τ)g(t+τ)就代表把gg平移ττ个时刻。其实Convolution和Cross-correlation在图像处理的书里一般都会提到,这里就不多叙述了。
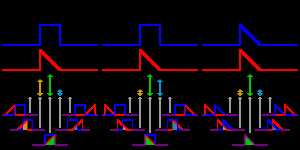
而Correlation Filter应用于tracking方面最朴素的想法就是:相关是衡量两个信号相似值的度量,如果两个信号越相似,那么其相关值就越高,而在tracking的应用里,就是需要设计一个滤波模板,使得当它作用在跟踪目标上时,得到的响应最大,如下图所示:

CF方法最大的优势在于其速度之快,是任何其他跟踪方法都无法比拟的,如本篇所写的MOSSE,其速度可以到669帧每秒,把跟踪算法从real time 级别提升到了high speed级别;而且其跟踪准确率高,在wuyi他们的online benchmark上,带核函数的CSK方法可以得到73%左右的准确率。有着如此明显的优点,相信此类方法将会成为跟踪领域内继sparse方法的又一重要分支。
好,言归正传,我们先来介绍CF中的元老,MOSSE。按照我们刚刚的思路,我们需要寻找一个滤波模板,使得它在目标上的响应最大,那么写成公式就是如(2)所示
g=h ★f(2)g=h ★f(2)
其中gg表示响应输出,ff表示输入图像,hh表示我们的滤波模板。 gg可以为任意形状的响应输出,在上图的示意图里我们就假设它为gaussian形状。那么显然,我们只要求出hh就可以了。这样做看起来很简单,但为何CF类方法的速度如此之快呢?就是因为在求解等一系列操作中,都利用了快速傅里叶变换FFT。由卷积定理的correlation版本可知,函数互相关的傅里叶变换等于函数傅里叶变换的乘积,即如(2)式所示:
Fh ★f=(Fh)∗⊙Ff(3)Fh ★f=(Fh)∗⊙Ff(3)
其中FF表示傅里叶变换,⊙⊙表示点乘。那么假设ff所含的像素个数为nn,而已知FFT的时间开销为O(nlogn)O(nlog?n),因此式(3)的计算开销也为O(nlogn)O(nlog?n)!远比其他跟踪算法要快!明白这一点后,本篇论文的精华你已经掌握了。剩下的就是如何计算hh了,为了表达的方便起见,我们设Ff=FFf=F,(Fh)∗=H∗(Fh)∗=H∗,Fg=GFg=G,那么我们就有
H∗=GF(4)H∗=GF(4)
但是在实际应用中,因为目标的外观变换等因素影响,我们需要同时考虑目标的mm个图像作为参考,以提高模型的鲁棒性,那么就有如(5)的目标函数了:
minH∗∑i=1m|H∗Fi−Gi|2(5)minH∗∑i=1m|H∗Fi−Gi|2(5)
求解式(5)并不困难,而且根据卷积定理,在频率域的操作都是元素级别的,因此我们可以分别求解H∗H∗中的每一个元素H∗w,vHw,v∗,那么(5)就可以变为:
minH∗w,v∑i=1m|H∗w,vFw,v,i−Gw,v,i|2(6)minHw,v∗∑i=1m|Hw,v∗Fw,v,i−Gw,v,i|2(6)
然后对(6)式求导并使其为0即可求解,但要注意的是,论文中特别指出在复数域的求导与在实数域的有一点区别: