标签:
更多资讯 见xiaok海洋测绘网
1、利用GPS的时间与1PPS,不停地调整多波束处理单元的时间,使多波束处理单元的时间始终与GPS的时间保持同步;
2、当多波束PU内部时钟与GPS接收机的1PPS信号同步,而不是与PU硬件计数器同步时,每当1PPS到达处理单元,内部时钟的毫秒部分全部被设置为零。这种使用GPS接收机1PPS的同步方法,是一种与外部时钟同步最为可靠、最简便的方法。
3、运动传感器时间延迟,一般都使用运动补偿器制造商提供的时间延迟值
4、同步精度要求通常由GPS的定位精度与船速而定。例如,当定位系统的精度为0.5m,调查船的速度为10kn或5m/s时,同步精度需小于100ms。
5、非同步作业方式后处理有两个方法:(1)原始数据按时间排序,重新进行合并(第1篇);(2)延迟校正(第2篇文献)
刘胜旋等《1PPS时间同步对多波束测深质量的影响》2011年
摘要:时间同步误差是多波束测量的一个重要误差源。因此,在进行多波束海底地形测量时,一般都利用GPS的1PPS信号来实现精确的时间同步。介绍了1PPS信号,分析了多波束测深系统的时间同步原理,以及在没有1PPS同步的情况下,后处理时应注意的事项。最后对野外资料采集提出了相应的建议。
1 引言
目前,所有的多波束测深系统均可由以下三个子系统组成:①多波束声学子系统;②波束空间位置
传感子系统;③数据采集、处理子系统[1]。其中波束空间位置传感子系统又包括运动传感器、GPS定位系统、电罗经和声速剖面仪。为了将多波束测点正确归位到大地参考坐标系[2],必须将多波束声学子系统与波束空间位置传感子系统测量到的数据准确地合并在一起。而将所有这些数据合并起来的唯一关键字段就是时间。只有将这些数据按正确的时间合并在一起,才能够获得正确的波束点三维坐标。要做到这一点,就必须精确测量它们之间的相对时间延迟或实现各种设备之间的时间同步。方法主要有两种:一种是时间延迟法,另一种是时间同步法[ 3]。时间延迟法主要应用在延迟值恒定不变的情况,如果延迟值不固定,存在漂移的情况,则不宜应用此方法。时间同步法就是利用GPS的时间与1PPS,不停地调整多波束处理单元的时间,使多波束处理单元的时间始终与GPS的时间保持同步[
4]。如果多波束处理单元与GPS接收机时间之间延迟值没有精确测量或存在漂移现象(没有1PPS同步),则在资料后处理时有可能得出错误的结果。
2 秒脉冲信号及同步原理
2.1 1PPS信号介绍
全球定位系统(GPS)是由美国国防部发射,有24颗环绕地球的卫星系统。卫星向全球发射标准授时信号,只要有接收装置就可以接收。目前市场上所采用的GPS时钟设备品种较多,不过大同小异,通过搜索锁定4~ 6颗卫星,均能计算出精确的格林威治时间,并发出校时信号[5]。
GPS接收机的输出频率一般为1Hz,除了输出符合NMEA - 0183标准中常用的$GPGGA、$GPZDA数据包外[6],还可以输出秒脉冲信号1PPS(pulsepersecond), 1PPS信号不包含绝对时间信息,是一种结构最简单的时间同步信息。 1PPS信号每秒钟输出一个脉冲,其上升沿或下降沿与世界协调时(UTC)在秒点是对齐的,同步精度对不同GPS接收机是不一样的,对高精度接收机可小于100ns。GPS接收机严格在每一个脉冲的上升沿或下降沿时刻进行一次伪距、伪距率、载波相位等测量[7]。
2.2 同步原理
项目采用美国NavCom公司SF- 2050M型GPS的1PPS脉冲作为时标。其电平信号为+ 5V,低电平则表示没有信号输出。脉冲宽度默认为100ms(可调范围为10~ 999ms)。在GPS接收机取得有效导航解的时候,从中提取并输出两种时间信号:一是频率为1Hz的脉冲信号1PPS,其脉冲上升沿或下降沿与UTC的同步误差可精确到纳秒级;二是包括在RS232传输数据中的$GPGGA或$GPZDA语句给出的UTC绝对时间(年、月、日、时、分、秒),它是与1PPS脉冲相对应的,由于RS232通信中传输速率的影响,秒脉冲的前沿与通过串口读出的信息的第一个字节有0~
50ms的延迟,即GPS接收机先向用户提供秒脉冲,再提供该时刻的数值。根据接收到的1PPS脉冲与该时刻的数值时间,多波束处理单元对时钟进行校正,实现多波束处理单元时钟与GPS时钟的同步[8]。
3 Simrad多波束系统的时间同步
Simrad多波束系统的处理单元自带一个分辨率为1ms的内部软件时钟,它与一个内部硬件计算器同步(在没有外部同步器的情况下),用于时标所有与时间相关的数据。该主机绝对时间与日期在主机启动时、新建调查项目时、或停止记录人工干预时均会重新设置(或同步)。设置时其同步源为:工作站的时钟、GGA数据包里的时钟或ZDA数据包里的时钟。处理单元在每次发射一个呯时,均产生一个中断,得到该呯的时间,然后读取外部传感器数据的抵达时间。由于内部硬件计数器不是严格地运行于1kHz,因此该时钟会发生漂移的现象,通常是每24h有几秒钟的漂移[
6]。当内部时钟与GPS接收机的1PPS信号同步,而不是与硬件计数器同步时,每当1PPS到达处理单元,内部时钟的毫秒部分全部被设置为零。这种使用GPS接收机1PPS的同步方法,是一种与外部时钟同步最为可靠、最简便的方法。
当内部时钟与GPS时钟同步时,应注意GGA数据只包含有时间字段,而不包含日期字段。如果内部时钟与工作站时钟同步,则内部时钟可以设置成任意时间。另外,如果外部时钟是通过串口线与处理单元连接(如GPS时钟),则当外部时钟的数据到达处理单元时,它将与其他外部传感器数据一样被打上时标且存储下来,这样可以连续地检查两个时钟的任何漂移情况。
内部时钟与GPS时钟的同步精度要求通常由GPS的定位精度与船速而定。例如,当定位系统的精度为0.5m,调查船的速度为10kn或5m/s时,同步精度需小于100ms。
多波束测深数据与运动传感器数据之间时间同步也是获取高精度多波束测深数据的重要条件。由于运动补偿器数据包不包含时间信息,它们之间的同步只能通过内部时钟的时标与时间延迟来解决。当运动补偿数据包(包含横摇、纵倾、起伏等数据)的第一个字节到达处理单元时,处理单元将产生一个时标,用于标签这些数据包。由于该数据包在运动传感器内处理、线路传输将占用一定的时间,因此当数据包到达处理单元时,可能有一定的时间延迟,该时间延迟值可以在运动补偿器内设置,然后进行相应的补偿。在底部检测阶段,运动补偿数据将对船的姿态进行补偿,以获取波束正确的三维坐标。在实际测量时,一般都使用运动补偿器制造商提供的时间延迟值。但有时两者之间的时间同步依然存在显著的偏差(在实时监控图上主要表现为明显的横摇残留影响),其原因可能是时间延迟的漂移或任何错误设置。对于这种情况,目前还没有一种简单有效的方法来解决。由于运动补偿数据被连续地打上时标并且记录下来,在后处理时有可能识别出来并加以改正。由于运动传感器中实时横摇参数对姿态改正极为重要,因此要求多波束测深数据与运
动传感器数据之间的时间同步精度优于5ms[9]。
类似地,如果是采用独立的罗经来获取艏向数据,同样应该考虑多波束数据与罗经数据之间的时间延迟。
4 非1PPS同步的后处理分析
如果在野外测量时将内部时钟源设置为GPS时钟,并且采用1PPS同步,则多波束原始数据内记
录的内部时钟与GPS时钟将完全一致,在后处理时无论采用内部时钟,还是采用GPS时钟为时标,结
果也完全一致。因此本文仅讨论没有使用1PPS同步的情况。
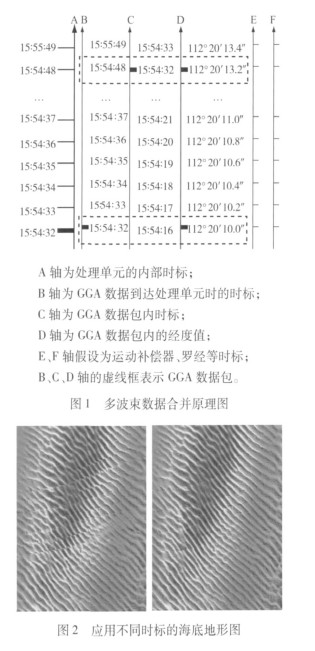
如果暂且忽略GPS数据到处理单元之间的时间延迟,那么经过初始化同步后,处理单元的时钟将与GPS的时钟完全一致。但由于处理单元时钟的漂移,造成两个时钟存在一个偏差,该偏差并非为恒定值,有时偏差值为14s,有时偏差为16s(见图1)。如果采用不同的时标绘制相同波束点位图,将会发现两者的位置偏移几乎达100m,而相同波束号的水深值、时间完全相同。后处理时,如果选择时标的来源为内部时钟,则在数据合并阶段,将合并A、B、D、E、F轴的数据;如果选择时标的来源为GPS时钟,则合并A、C、D、E、F轴的数据。由此可见,只要选择内部时钟为时标,以及假定GPS数据包到处理单元的时间延迟为恒定值,则无论内部时钟如何漂移(处理单元的绝对时间已经变得不重要了,重要的是GPS数据的延迟时间),多波束测深数据均能够很好地与定位数据合并。
图2为使用不同时标的处理结果绘制的海底地形三维图,左侧为使用GPS时标的处理结果,右侧为使用内部时标的处理结果。当使用GPS时标时,图形顶部与底部处的沙波拼接的较好,原因是经过了人工手动时间同步;而中部则出现明显的错动,这是由于多波束内部时钟漂移所致。当使用内部时标时,整个图形的沙波连贯性非常好,能够很好地拼接。
5 结束语
通过以上分析,得出以下结论与建议。
(1)运动补偿数据时间延迟必须为常量且误差小于5ms。
(2)如果GPS定位数据的时间延迟与定位的精度和船速相当,或时间延迟为恒定值,则内部时钟与 GPS时钟无需同步,但如果1PPS信号可用的话,建议尽量利用1PPS信号与内部时钟同步。
(3)如果GPS定位数据的时间延迟变化不定,多波束系统的内部时钟与GPS时钟必须通过1PPS信号实现精确同步。这样,在野外实时监控显示或后处理时,无论采用内部时钟,还是GPS时钟为时标,均得到相同正确的结果。
张志伟等《多波束测深系统时延偏差探测及校正方法》
摘要: 在利用多波束测深系统进行高精度海底地形测量时,各传感器之间数据采集时间不同步的问题,即存在时延偏差,这将会直接影响多波束测深数据质量,为此提出了一种基于最小二乘原理的多波束测深时延偏差探测及校正方法,给出了时延偏差探测及校正计算模型,设计了时延偏差探测及校正流程,通过实例分析,验证了所提方法的适用性和有效性。
多波束测深系统是由多个传感器组成的复杂系统[1]。为了提高测点位置归算精度,必须将多波束各子系统及相关传感器数据准确地融合在一起。这就要求精确测定它们之间的时延偏差,以削弱测点位置归算误差的影响,提高多波束海底地形测量的精度。
目前对多波束系统进行时延偏差探测及校正主要有下列两种方法: 一种是通过校准实验求取时延偏差值[2-5],但由于校准海区地形复杂,校准方法不易操作等诸多因素的影响,常常不能完全消除时延偏差的影响[6]; 另一种是利用 GPS 的1PPS 信号实现精确的时间同步[7-8],但并不是所有的 GPS 接收机都带有 1PPS 信号输出功能,所以利用 GPS 的 1PPS 信号同步方法具有一定的局限性[9]。此外,许多多波束测深数据后处理软件对于时延偏差设有专门的参数校正模块[10-13],但参数校正过程对于人工判断的依赖性较强,缺乏数学依据,所以如何利用已测数据实现时延偏差的精确探测以及有效校正仍是多波束测深的重点难点问题。
针对上述问题,选取两条重合往返测线的多波束实测数据,基于最小二乘原理提出了一种多波束测深系统时延偏差探测及校正方法。
3 结论
针对常用多波束后处理软件中 Calibration 校正模块,利用人工判定对时延偏差进行二次校正
的不足,结合离散函数内插技术及最小二乘原理对多波束测深数据进行后处理,提出了一种基于最小二乘配置技术的多波束测深时延偏差探测及校正方法。并通过实例加以验证,校正效果较为理想,达到了提高测点位置归算精度的目的。
标签:
原文地址:http://blog.csdn.net/xiaokcehui/article/details/51713768