标签:
参考:http://www.cnblogs.com/Imageshop/p/4694540.html
一、算法基本原理
均值模糊的各像素的权重是一样的;
高斯模糊的权重和像素距离中心点的距离成高斯分布;
以上两种滤波器无法区分出图像的边缘等信息的,导致被模糊后的图像细节严重丢失。
本文原理:设置某个像素差范围,当领域像素和中心点像素的差距超出上述范围时,设置其权重很小,甚至为0;而对像素差处于范围内的像素进行均值滤波;
这样对于本身比较平滑的区域,和原始的算法区别不大,而对于像素值变化较为明显的边缘地带,则能够有效地保留原始信息,这样就能起到降低噪音的同时保留边缘的信息
二、算法处理效果图

左边原图,右侧处理后图(参数r =9, Threshold = 40)
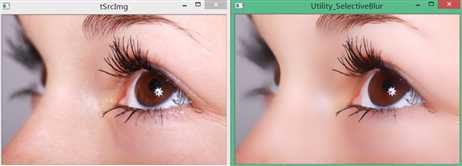
左边原图,右侧处理后图(参数r =9, Threshold = 40)
三、说明
(1)本次实验采用的图来源于:http://www.cnblogs.com/Imageshop/p/4694540.html
(2)本文只是做算法实践,效果图边缘部分未进行处理;
标签:
原文地址:http://www.cnblogs.com/newbyang/p/5624121.html