标签:
船用发动机监控系统为什么使用CAN总线通信协议呢?
CAN总线基础知识:
CAN报文发送优先权抉择:
CAN数据帧组成:
(1) 帧起始。 表示数据开的段帧起始。
(2) 仲裁段。 表示该帧优先级的仲裁段。
(3) 控制段。 表示数据的字节及保留位控制段。
(4) 数据段。 数据的内容,一帧可发送0~8个字节的数据段。
(5) CRC段。 检查帧的传输错误段。
(6) ACK段。 表示确认正常接收的段。
(7) 帧结束。 表示数据的段帧结束。
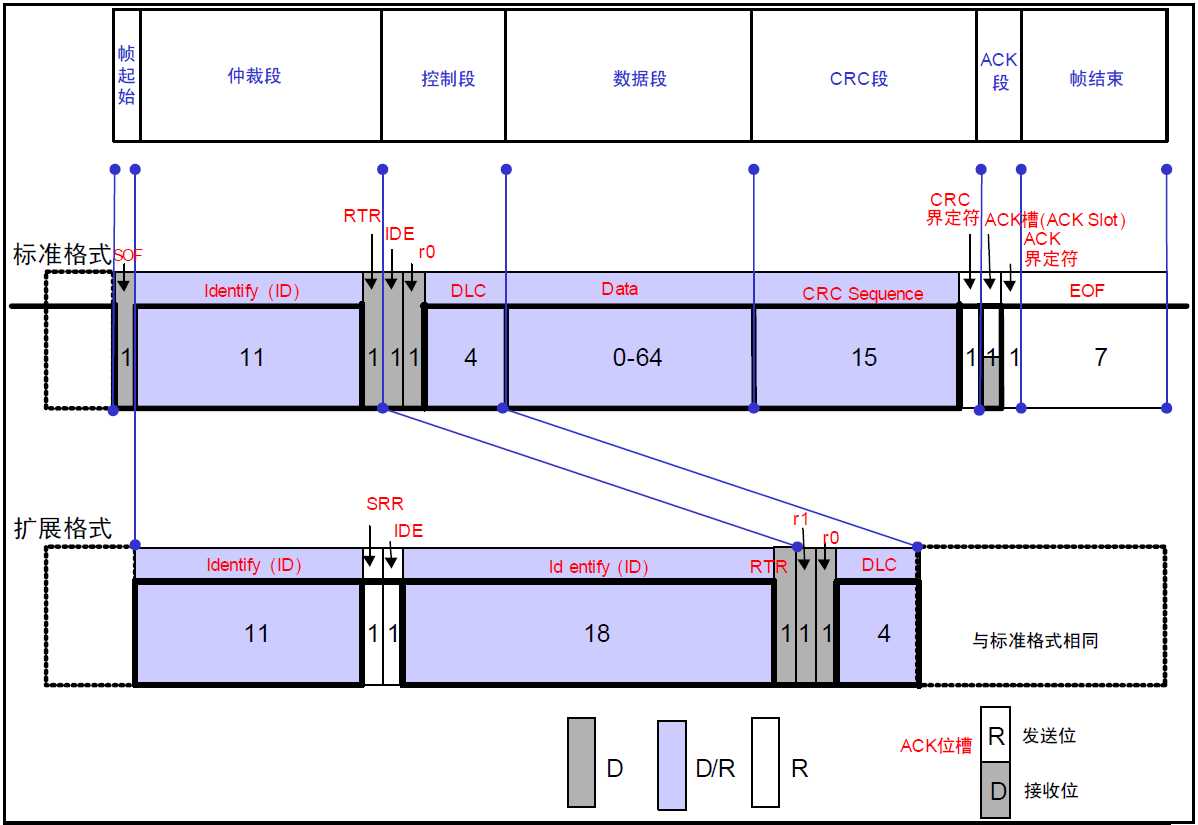
应答场(ACK)包括应答位和应答分隔符。发送站发送的这两位均为隐性电平(逻辑1),这时正确接收报文的接收站发送主控电平(逻辑0)覆盖它。用这种方法,发送站可以保证网络中至少有一个站能正确接收到报文远程帧由6 个场组成:帧起始、仲裁场、控制场、CRC 场、应答场和帧结束。远程帧不存在数据场。远程帧的RTR 位必须是隐位。DLC 的数据值是独立的,它可以是0~8 中的任何数值,为对应数据帧的数据长度。
标签:
原文地址:http://www.cnblogs.com/beaglebone/p/5635330.html