标签:
前提条件:1,确保读者已经安装了kinect或者其他深度摄像头的驱动,如果未安装,可以直接在网盘下载:http://pan.baidu.com/s/1hqHB10w 提取密码:wrmn
利用深度相机仿激光数据创建地图:
所依赖包的下载与安装:
1,安装hector_slam
2,下载hector_slam_example:下载地址,编译好之后,记住需要将这个文件加入ros包中
ROS_PACKAGE_PATH=/home/用户名/catkin_ws/hector_slam_example:$ROS_PACKAGE_PATH
当然路径改成你自己的路径。
3,Install the dependency packages:
rosdep install hector_slam_example
4,在启动之前如果你用的是kinect,那就请你修改一下launch文件吧。
<include file="$(find openni_launch)/launch/openni.launch">
#由于我们使用的kinect,openni2已近不支持了。所以用openni然后就是roslaunch
roslaunch hector_slam_example hector_openni.launch
只需要让移动平台移动就可以去构建地图了,当然这里面用的生成模拟极光的方法是depthimage_to_laserscan,代码的方法速度更快但是要求摄像头要相对稳定,并且尽量水平放置。
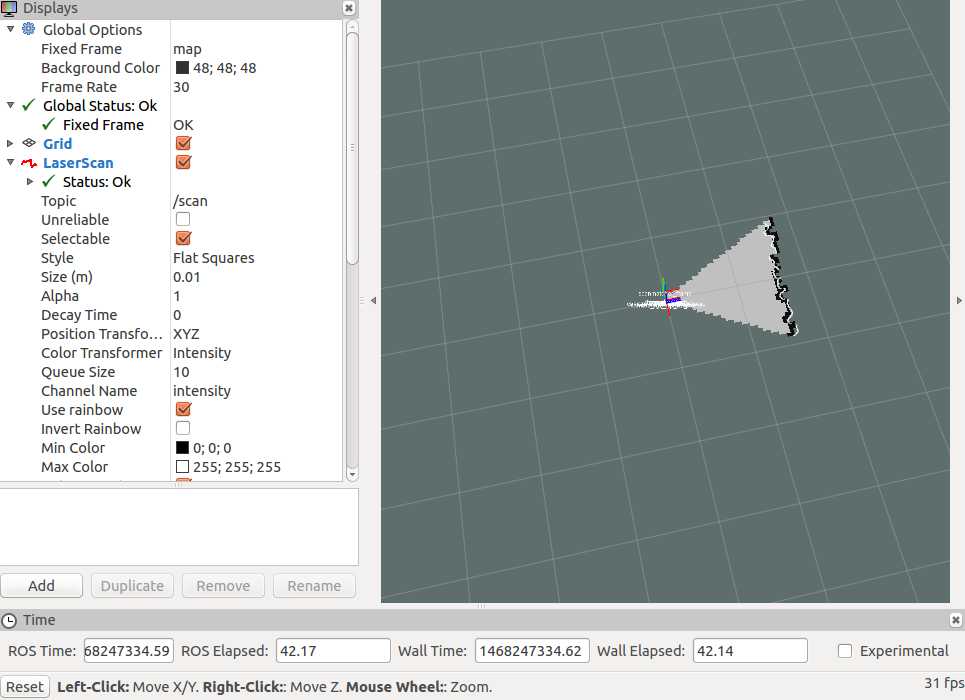
效果:
从单帧来看,还是不错的,
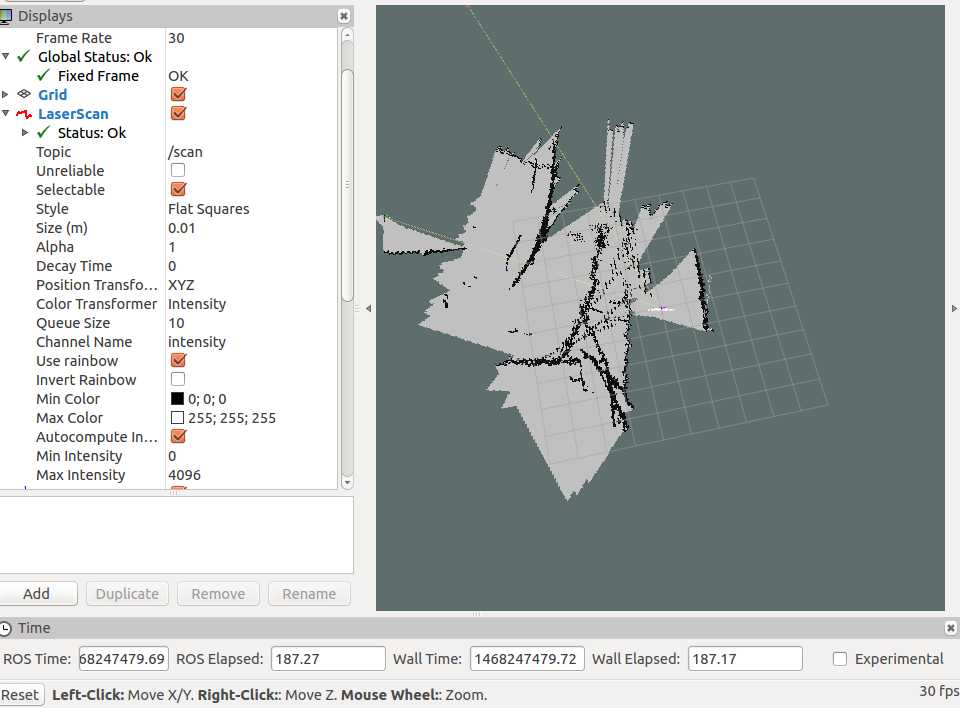
但是移动一下后就发现问题了:
查了一下后才知道:
ros中常用的2d slam算法主要有gmapping和hector_slam,其中
hector_slam是个性能非常好的算法,但是作者在论文中说的很明白,hector_slam通过最小二乘法匹配扫描点,且依赖高精度的激光雷达数据,但是不需要里程计。因此扫描角很小且噪声较大的kinect是不行的,我试过,匹配的时候会陷入局部点,地图非常混乱。
ros学习笔记 - 深度传感器转换成激光数据(hector_slam)
标签:
原文地址:http://www.cnblogs.com/yoyo-sincerely/p/5661616.html