标签:
参考资料:
ROS安装: ros 是一个framework 和Android有点像,内核用的linux。Ros提供了一种供机器人开发者迅速上手的一个平台,
可以快速搭建自己的应用,利用ros下面自带的应用,不需要自己再重复写程序。
1、ros官网资料很多
http://www.ros.org/ ros官网
点击进入wiki ,里面有ros安装等一系列教程。
?
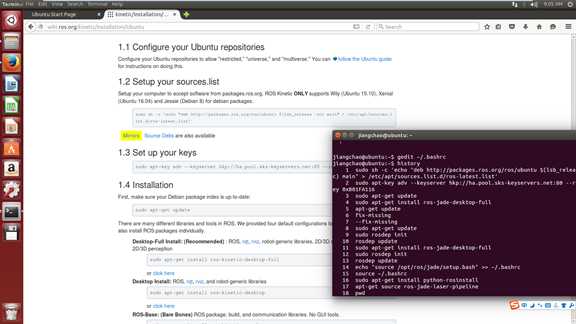
2、注重平台选择,相应的Ubuntu版本对应着相应的Ros版本。这点需要大家搞清楚。
平台选择: Ubuntu: 14.04
Ros : Jade

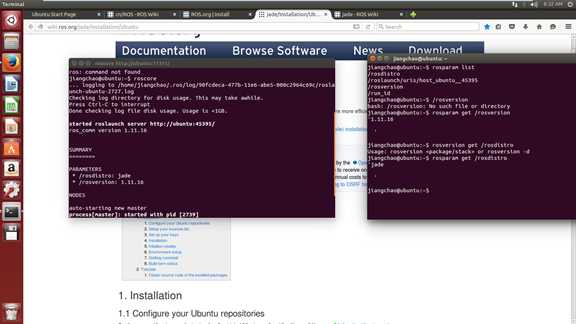
小助手:如何查看ros安装版本。
当我们用虚拟机安装的话,只需要拷贝相应的虚拟机.vmx文件即可。
Ros 务必需要运行在一个模拟器上面,作为ros的插件。Roslaunch相关
?
?
3、安装Vrep
搜索Vrep 安装,打开主页,选择相应的版本进行安装。

目前我们选择的是 PRO-EDU-V3_3_1_64.
Vrep 本身是一个开源项目,只需要git 就可以把Vrep 给下载下来。当然,需要我们选择合适的版本。

建立文件夹,我们可以先在windows里面下载好,然后通过VMware直接复制到Ubuntu里面去,但要主要权限问题,有些地方.tar文件是粘贴不进去的。
只有Home目录可以凑合一下。还有就是上面提到的ros下面需要建立模拟器,此模拟器是给VREP用的,ros上面并没有显示的界面。借助模拟器才可以弄。
打开VREP程序:通过.sh脚本文件打开。
?
4、安装完VREP和ROS之后,如何进行两者间等人通信?
需要安装插件,Vrep_ros_bridge.git
?
在gitHub上面有详细的安装过程,大家可以去参考。
此插件安装过程中,可能并不会成功,因为有些直接或间接依赖。
可以尝试安装 其他包,比如下面命令:
当然,在主文件夹下面,某些插件包里面,如果我们选择 建立 CATKIN_IGNORE时,
此时这个包在编译的时候,并不会发挥作用。当然,在编译之前,务必建立好~/.bashrc命令,且多个终端需要关闭。
不然一直认为没有关闭。
?
此弄完之后,就可以进行通信了。具体见下一期。
标签:
原文地址:http://www.cnblogs.com/zhuxuekui/p/5662159.html