标签:
整理摘录 skyseraph 代码所得
出处:http://www.cnblogs.com/skyseraph/
复制The All 可直接运行

1 #include <windows.h> 2 #include "cv.h" 3 #include "highgui.h" 4 #include <stdio.h> 5 #include <math.h> 6 #include <iostream> 7 #include <ctime> 8 9 using namespace std; 10 /*===============================核心程序===========================================*/ 11 int main(int argc,char** argv) 12 { 13 IplImage *src,*grayImg; 14 src=cvLoadImage("Lena.jpg",1); 15 grayImg=cvCreateImage(cvGetSize(src),src->depth,1); 16 cvCvtColor(src,grayImg,CV_BGR2GRAY); 17 18 /*===============================图像分割=====================================*/ 19 20 /*手动设置阈值*/ 21 IplImage* binaryImg = cvCreateImage(cvGetSize(src),IPL_DEPTH_8U, 1); 22 cvThreshold(grayImg,binaryImg,71,255,CV_THRESH_BINARY); 23 cvNamedWindow("cvThreshold", CV_WINDOW_AUTOSIZE ); 24 cvShowImage( "cvThreshold", binaryImg ); 25 const char* path1; 26 path1="Threshold.bmp"; 27 cvSaveImage(path1, binaryImg); 28 29 30 /*---------------------------------------------------------------------------*/ 31 /*自适应阀值 //计算像域邻域的平均灰度,来决定二值化的值*/ 32 33 IplImage* adThresImg = cvCreateImage(cvGetSize(src),IPL_DEPTH_8U, 1); 34 double max_value=255; 35 int adpative_method=CV_ADAPTIVE_THRESH_GAUSSIAN_C;//CV_ADAPTIVE_THRESH_MEAN_C 36 int threshold_type=CV_THRESH_BINARY; 37 int block_size=3;//阈值的象素邻域大小 38 int offset=5;//窗口尺寸 39 cvAdaptiveThreshold(grayImg,adThresImg,max_value,adpative_method,threshold_type,block_size,offset); 40 cvNamedWindow("cvAdaptiveThreshold", CV_WINDOW_AUTOSIZE ); 41 cvShowImage( "cvAdaptiveThreshold", adThresImg ); 42 const char* path2; 43 path2="AdaptiveThreshold.bmp"; 44 cvSaveImage(path2, adThresImg); 45 /*---------------------------------------------------------------------------*/ 46 47 48 /*最大熵阀值分割法*/ 49 50 IplImage* imgMaxEntropy = cvCreateImage(cvGetSize(src),IPL_DEPTH_8U,1); 51 MaxEntropy(grayImg,imgMaxEntropy); 52 cvNamedWindow("MaxEntroyThreshold", CV_WINDOW_AUTOSIZE ); 53 cvShowImage( "MaxEntroyThreshold", imgMaxEntropy );//显示图像 54 const char* path3; 55 path3="MaxEntropy.bmp"; 56 cvSaveImage(path3, imgMaxEntropy); 57 58 /*-----------------------------------------------------------------------------*/ 59 60 /*基本全局阀值法*/ 61 62 IplImage* imgBasicGlobalThreshold = cvCreateImage(cvGetSize(grayImg),IPL_DEPTH_8U,1); 63 imgBasicGlobalThreshold=cvCloneImage(grayImg); 64 int pg[256],i,thre; 65 for (i=0;i<256;i++) pg[i]=0; 66 for (i=0;i<imgBasicGlobalThreshold->imageSize;i++) // 直方图统计 67 pg[(byte)imgBasicGlobalThreshold->imageData[i]]++; 68 thre = BasicGlobalThreshold(pg,0,256); // 确定阈值 69 cout<<"The Threshold of this Image in BasicGlobalThreshold is:"<<thre<<endl;//输出显示阀值 70 cvThreshold(imgBasicGlobalThreshold,imgBasicGlobalThreshold,thre,255,CV_THRESH_BINARY); // 二值化 71 cvNamedWindow("BasicGlobalThreshold", CV_WINDOW_AUTOSIZE ); 72 cvShowImage( "BasicGlobalThreshold", imgBasicGlobalThreshold);//显示图像 73 const char* path4; 74 path4="BasicGlobalThreshold.bmp"; 75 cvSaveImage(path4, imgBasicGlobalThreshold); 76 77 /*----------------------------------------------------------------------------------------*/ 78 79 /*OTSU*/ 80 81 IplImage* imgOtsu = cvCreateImage(cvGetSize(grayImg),IPL_DEPTH_8U,1); 82 imgOtsu=cvCloneImage(grayImg); 83 int thre2; 84 thre2 = otsu(imgOtsu); 85 cout<<"The Threshold of this Image in Otsu is:"<<thre2<<endl;//输出显示阀值 86 cvThreshold(imgOtsu,imgOtsu,thre2,255,CV_THRESH_BINARY); // 二值化 87 cvNamedWindow("imgOtsu", CV_WINDOW_AUTOSIZE ); 88 cvShowImage( "imgOtsu", imgOtsu);//显示图像 89 const char* path5; 90 path5="Otsu.bmp"; 91 cvSaveImage(path5, imgOtsu); 92 93 /*-------------------------------------------------------------------------------------------*/ 94 /*上下阀值法:利用正态分布求可信区间*/ 95 IplImage* imgTopDown = cvCreateImage( cvGetSize(grayImg), IPL_DEPTH_8U, 1 ); 96 imgTopDown=cvCloneImage(grayImg); 97 CvScalar mean ,std_dev;//平均值、 标准差 98 double u_threshold,d_threshold; 99 cvAvgSdv(imgTopDown,&mean,&std_dev,NULL); 100 u_threshold = mean.val[0] +2.5* std_dev.val[0];//上阀值 101 d_threshold = mean.val[0] -2.5* std_dev.val[0];//下阀值 102 cout<<"The TopThreshold of this Image in TopDown is:"<<d_threshold<<endl;//输出显示阀值 103 cout<<"The DownThreshold of this Image in TopDown is:"<<u_threshold<<endl; 104 cvThreshold(imgTopDown,imgTopDown,d_threshold,u_threshold,CV_THRESH_BINARY_INV);//上下阀值 105 cvNamedWindow("imgTopDown", CV_WINDOW_AUTOSIZE ); 106 cvShowImage( "imgTopDown", imgTopDown);//显示图像 107 const char* path6; 108 path6="TopDown.bmp"; 109 cvSaveImage(path6, imgTopDown); 110 111 /*---------------------------------------------------------------------------*/ 112 /*迭代法*/ 113 IplImage* imgIteration = cvCreateImage( cvGetSize(grayImg), IPL_DEPTH_8U, 1 ); 114 imgIteration=cvCloneImage(grayImg); 115 int thre3,nDiffRec; 116 thre3 =DetectThreshold(imgIteration, 100, nDiffRec); 117 cout<<"The Threshold of this Image in imgIteration is:"<<thre3<<endl;//输出显示阀值 118 cvThreshold(imgIteration,imgIteration,thre3,255,CV_THRESH_BINARY_INV);//上下阀值 119 cvNamedWindow("imgIteration", CV_WINDOW_AUTOSIZE ); 120 cvShowImage( "imgIteration", imgIteration); 121 const char* path7; 122 path7="Iteration.bmp"; 123 cvSaveImage(path7, imgIteration); 124 125 126 127 128 /*---------------------------------------------------------------------------*/ 129 /*释放内存空间*/ 130 cvReleaseImage(&imgIteration); 131 cvReleaseImage(&imgTopDown); 132 cvReleaseImage(&imgOtsu); 133 cvReleaseImage(&imgBasicGlobalThreshold); 134 cvReleaseImage(&imgMaxEntropy ); 135 cvReleaseImage(&adThresImg); 136 cvReleaseImage(&binaryImg); 137 cvWaitKey(0);return 0; 138 }
1 /*============================================================================ 2 = 代码内容:最大熵阈值分割 3 = 修改日期:2009-3-3 4 = 作者:crond123 5 = 博客:http://blog.csdn.net/crond123/ 6 = E_Mail:crond123@163.com 7 ===============================================================================*/ 8 // 计算当前位置的能量熵 9 int HistogramBins = 256; 10 float HistogramRange1[2] = {0,255}; 11 float *HistogramRange[1] = {&HistogramRange1[0]}; 12 typedef enum {back,object} entropy_state; 13 double caculateCurrentEntropy(CvHistogram * Histogram1,int cur_threshold,entropy_state state) 14 { 15 int start,end; 16 int total =0; 17 double cur_entropy =0.0; 18 if(state == back) 19 { 20 start =0; 21 end = cur_threshold; 22 } 23 else 24 { 25 start = cur_threshold; 26 end =256; 27 } 28 for(int i=start;i<end;i++) 29 { 30 total += (int)cvQueryHistValue_1D(Histogram1,i);//查询直方块的值 P304 31 } 32 for(int j=start;j<end;j++) 33 { 34 if((int)cvQueryHistValue_1D(Histogram1,j)==0) 35 continue; 36 double percentage = cvQueryHistValue_1D(Histogram1,j)/total; 37 /*熵的定义公式*/ 38 cur_entropy +=-percentage*logf(percentage); 39 /*根据泰勒展式去掉高次项得到的熵的近似计算公式 40 cur_entropy += percentage*percentage;*/ 41 } 42 return cur_entropy; 43 // return (1-cur_entropy); 44 } 45 46 //寻找最大熵阈值并分割 47 void MaxEntropy(IplImage *src,IplImage *dst) 48 { 49 assert(src != NULL); 50 assert(src->depth ==8&& dst->depth ==8); 51 assert(src->nChannels ==1); 52 CvHistogram * hist = cvCreateHist(1,&HistogramBins,CV_HIST_ARRAY,HistogramRange);//创建一个指定尺寸的直方图 53 //参数含义:直方图包含的维数、直方图维数尺寸的数组、直方图的表示格式、方块范围数组、归一化标志 54 cvCalcHist(&src,hist);//计算直方图 55 double maxentropy =-1.0; 56 int max_index =-1; 57 // 循环测试每个分割点,寻找到最大的阈值分割点 58 for(int i=0;i<HistogramBins;i++) 59 { 60 double cur_entropy = caculateCurrentEntropy(hist,i,object)+caculateCurrentEntropy(hist,i,back); 61 if(cur_entropy>maxentropy) 62 { 63 maxentropy = cur_entropy; 64 max_index = i; 65 } 66 } 67 cout<<"The Threshold of this Image in MaxEntropy is:"<<max_index<<endl; 68 cvThreshold(src, dst, (double)max_index,255, CV_THRESH_BINARY); 69 cvReleaseHist(&hist); 70 } 71 72 73 /*============================================================================ 74 = 代码内容:基本全局阈值法 75 ==============================================================================*/ 76 int BasicGlobalThreshold(int*pg,int start,int end) 77 { // 基本全局阈值法 78 int i,t,t1,t2,k1,k2; 79 double u,u1,u2; 80 t=0; 81 u=0; 82 for (i=start;i<end;i++) 83 { 84 t+=pg[i]; 85 u+=i*pg[i]; 86 } 87 k2=(int) (u/t); // 计算此范围灰度的平均值 88 do 89 { 90 k1=k2; 91 t1=0; 92 u1=0; 93 for (i=start;i<=k1;i++) 94 { // 计算低灰度组的累加和 95 t1+=pg[i]; 96 u1+=i*pg[i]; 97 } 98 t2=t-t1; 99 u2=u-u1; 100 if (t1) 101 u1=u1/t1; // 计算低灰度组的平均值 102 else 103 u1=0; 104 if (t2) 105 u2=u2/t2; // 计算高灰度组的平均值 106 else 107 u2=0; 108 k2=(int) ((u1+u2)/2); // 得到新的阈值估计值 109 } 110 while(k1!=k2); // 数据未稳定,继续 111 //cout<<"The Threshold of this Image in BasicGlobalThreshold is:"<<k1<<endl; 112 return(k1); // 返回阈值 113 } 114 115 /*======================================================================*/ 116 /* OTSU global thresholding routine */ 117 /*======================================================================*/ 118 int otsu (IplImage *image) 119 { 120 int w = image->width; 121 int h = image->height; 122 123 unsigned char*np; // 图像指针 124 unsigned char pixel; 125 int thresholdValue=1; // 阈值 126 int ihist[256]; // 图像直方图,256个点 127 128 int i, j, k; // various counters 129 int n, n1, n2, gmin, gmax; 130 double m1, m2, sum, csum, fmax, sb; 131 132 // 对直方图置零... 133 memset(ihist, 0, sizeof(ihist)); 134 135 gmin=255; gmax=0; 136 // 生成直方图 137 for (i =0; i < h; i++) 138 { 139 np = (unsigned char*)(image->imageData + image->widthStep*i); 140 for (j =0; j < w; j++) 141 { 142 pixel = np[j]; 143 ihist[ pixel]++; 144 if(pixel > gmax) gmax= pixel; 145 if(pixel < gmin) gmin= pixel; 146 } 147 } 148 149 // set up everything 150 sum = csum =0.0; 151 n =0; 152 153 for (k =0; k <=255; k++) 154 { 155 sum += k * ihist[k]; /* x*f(x) 质量矩*/ 156 n += ihist[k]; /* f(x) 质量 */ 157 } 158 159 if (!n) 160 { 161 // if n has no value, there is problems... 162 //fprintf (stderr, "NOT NORMAL thresholdValue = 160\n"); 163 thresholdValue =160; 164 goto L; 165 } 166 167 // do the otsu global thresholding method 168 fmax =-1.0; 169 n1 =0; 170 for (k =0; k <255; k++) 171 { 172 n1 += ihist[k]; 173 if (!n1) { continue; } 174 n2 = n - n1; 175 if (n2 ==0) { break; } 176 csum += k *ihist[k]; 177 m1 = csum / n1; 178 m2 = (sum - csum) / n2; 179 sb = n1 * n2 *(m1 - m2) * (m1 - m2); 180 /* bbg: note: can be optimized. */ 181 if (sb > fmax) 182 { 183 fmax = sb; 184 thresholdValue = k; 185 } 186 } 187 188 L: 189 for (i =0; i < h; i++) 190 { 191 np = (unsigned char*)(image->imageData + image->widthStep*i); 192 for (j =0; j < w; j++) 193 { 194 if(np[j] >= thresholdValue) 195 np[j] =255; 196 else np[j] =0; 197 } 198 } 199 200 //cout<<"The Threshold of this Image in Otsu is:"<<thresholdValue<<endl; 201 return(thresholdValue); 202 } 203 204 /*======================================================================*/ 205 /* 迭代法*/ 206 /*======================================================================*/ 207 // nMaxIter:最大迭代次数;nDiffRec:使用给定阀值确定的亮区与暗区平均灰度差异值 208 int DetectThreshold(IplImage*img, int nMaxIter, int& iDiffRec) //阀值分割:迭代法 209 { 210 //图像信息 211 int height = img->height; 212 int width = img->width; 213 int step = img->widthStep/sizeof(uchar); 214 uchar *data = (uchar*)img->imageData; 215 216 iDiffRec =0; 217 int F[256]={ 0 }; //直方图数组 218 int iTotalGray=0;//灰度值和 219 int iTotalPixel =0;//像素数和 220 byte bt;//某点的像素值 221 222 uchar iThrehold,iNewThrehold;//阀值、新阀值 223 uchar iMaxGrayValue=0,iMinGrayValue=255;//原图像中的最大灰度值和最小灰度值 224 uchar iMeanGrayValue1,iMeanGrayValue2; 225 226 //获取(i,j)的值,存于直方图数组F 227 for(int i=0;i<width;i++) 228 { 229 for(int j=0;j<height;j++) 230 { 231 bt = data[i*step+j]; 232 if(bt<iMinGrayValue) 233 iMinGrayValue = bt; 234 if(bt>iMaxGrayValue) 235 iMaxGrayValue = bt; 236 F[bt]++; 237 } 238 } 239 240 iThrehold =0;// 241 iNewThrehold = (iMinGrayValue+iMaxGrayValue)/2;//初始阀值 242 iDiffRec = iMaxGrayValue - iMinGrayValue; 243 244 for(int a=0;(abs(iThrehold-iNewThrehold)>0.5)&&a<nMaxIter;a++)//迭代中止条件 245 { 246 iThrehold = iNewThrehold; 247 //小于当前阀值部分的平均灰度值 248 for(int i=iMinGrayValue;i<iThrehold;i++) 249 { 250 iTotalGray += F[i]*i;//F[]存储图像信息 251 iTotalPixel += F[i]; 252 } 253 iMeanGrayValue1 = (uchar)(iTotalGray/iTotalPixel); 254 //大于当前阀值部分的平均灰度值 255 iTotalPixel =0; 256 iTotalGray =0; 257 for(int j=iThrehold+1;j<iMaxGrayValue;j++) 258 { 259 iTotalGray += F[j]*j;//F[]存储图像信息 260 iTotalPixel += F[j]; 261 } 262 iMeanGrayValue2 = (uchar)(iTotalGray/iTotalPixel); 263 264 iNewThrehold = (iMeanGrayValue2+iMeanGrayValue1)/2; //新阀值 265 iDiffRec = abs(iMeanGrayValue2 - iMeanGrayValue1); 266 } 267 268 //cout<<"The Threshold of this Image in imgIteration is:"<<iThrehold<<endl; 269 return iThrehold; 270 }
1 #include <windows.h> 2 #include "cv.h" 3 #include "highgui.h" 4 #include <stdio.h> 5 #include <math.h> 6 #include <iostream> 7 #include <ctime> 8 9 using namespace std; 10 11 /*============================================================================ 12 = 代码内容:最大熵阈值分割 13 = 修改日期:2009-3-3 14 = 作者:crond123 15 = 博客:http://blog.csdn.net/crond123/ 16 = E_Mail:crond123@163.com 17 ===============================================================================*/ 18 // 计算当前位置的能量熵 19 int HistogramBins = 256; 20 float HistogramRange1[2] = {0,255}; 21 float *HistogramRange[1] = {&HistogramRange1[0]}; 22 typedef enum {back,object} entropy_state; 23 double caculateCurrentEntropy(CvHistogram * Histogram1,int cur_threshold,entropy_state state) 24 { 25 int start,end; 26 int total =0; 27 double cur_entropy =0.0; 28 if(state == back) 29 { 30 start =0; 31 end = cur_threshold; 32 } 33 else 34 { 35 start = cur_threshold; 36 end =256; 37 } 38 for(int i=start;i<end;i++) 39 { 40 total += (int)cvQueryHistValue_1D(Histogram1,i);//查询直方块的值 P304 41 } 42 for(int j=start;j<end;j++) 43 { 44 if((int)cvQueryHistValue_1D(Histogram1,j)==0) 45 continue; 46 double percentage = cvQueryHistValue_1D(Histogram1,j)/total; 47 /*熵的定义公式*/ 48 cur_entropy +=-percentage*logf(percentage); 49 /*根据泰勒展式去掉高次项得到的熵的近似计算公式 50 cur_entropy += percentage*percentage;*/ 51 } 52 return cur_entropy; 53 // return (1-cur_entropy); 54 } 55 56 //寻找最大熵阈值并分割 57 void MaxEntropy(IplImage *src,IplImage *dst) 58 { 59 assert(src != NULL); 60 assert(src->depth ==8&& dst->depth ==8); 61 assert(src->nChannels ==1); 62 CvHistogram * hist = cvCreateHist(1,&HistogramBins,CV_HIST_ARRAY,HistogramRange);//创建一个指定尺寸的直方图 63 //参数含义:直方图包含的维数、直方图维数尺寸的数组、直方图的表示格式、方块范围数组、归一化标志 64 cvCalcHist(&src,hist);//计算直方图 65 double maxentropy =-1.0; 66 int max_index =-1; 67 // 循环测试每个分割点,寻找到最大的阈值分割点 68 for(int i=0;i<HistogramBins;i++) 69 { 70 double cur_entropy = caculateCurrentEntropy(hist,i,object)+caculateCurrentEntropy(hist,i,back); 71 if(cur_entropy>maxentropy) 72 { 73 maxentropy = cur_entropy; 74 max_index = i; 75 } 76 } 77 cout<<"The Threshold of this Image in MaxEntropy is:"<<max_index<<endl; 78 cvThreshold(src, dst, (double)max_index,255, CV_THRESH_BINARY); 79 cvReleaseHist(&hist); 80 } 81 82 83 /*============================================================================ 84 = 代码内容:基本全局阈值法 85 ==============================================================================*/ 86 int BasicGlobalThreshold(int*pg,int start,int end) 87 { // 基本全局阈值法 88 int i,t,t1,t2,k1,k2; 89 double u,u1,u2; 90 t=0; 91 u=0; 92 for (i=start;i<end;i++) 93 { 94 t+=pg[i]; 95 u+=i*pg[i]; 96 } 97 k2=(int) (u/t); // 计算此范围灰度的平均值 98 do 99 { 100 k1=k2; 101 t1=0; 102 u1=0; 103 for (i=start;i<=k1;i++) 104 { // 计算低灰度组的累加和 105 t1+=pg[i]; 106 u1+=i*pg[i]; 107 } 108 t2=t-t1; 109 u2=u-u1; 110 if (t1) 111 u1=u1/t1; // 计算低灰度组的平均值 112 else 113 u1=0; 114 if (t2) 115 u2=u2/t2; // 计算高灰度组的平均值 116 else 117 u2=0; 118 k2=(int) ((u1+u2)/2); // 得到新的阈值估计值 119 } 120 while(k1!=k2); // 数据未稳定,继续 121 //cout<<"The Threshold of this Image in BasicGlobalThreshold is:"<<k1<<endl; 122 return(k1); // 返回阈值 123 } 124 125 /*======================================================================*/ 126 /* OTSU global thresholding routine */ 127 /*======================================================================*/ 128 int otsu (IplImage *image) 129 { 130 int w = image->width; 131 int h = image->height; 132 133 unsigned char*np; // 图像指针 134 unsigned char pixel; 135 int thresholdValue=1; // 阈值 136 int ihist[256]; // 图像直方图,256个点 137 138 int i, j, k; // various counters 139 int n, n1, n2, gmin, gmax; 140 double m1, m2, sum, csum, fmax, sb; 141 142 // 对直方图置零... 143 memset(ihist, 0, sizeof(ihist)); 144 145 gmin=255; gmax=0; 146 // 生成直方图 147 for (i =0; i < h; i++) 148 { 149 np = (unsigned char*)(image->imageData + image->widthStep*i); 150 for (j =0; j < w; j++) 151 { 152 pixel = np[j]; 153 ihist[ pixel]++; 154 if(pixel > gmax) gmax= pixel; 155 if(pixel < gmin) gmin= pixel; 156 } 157 } 158 159 // set up everything 160 sum = csum =0.0; 161 n =0; 162 163 for (k =0; k <=255; k++) 164 { 165 sum += k * ihist[k]; /* x*f(x) 质量矩*/ 166 n += ihist[k]; /* f(x) 质量 */ 167 } 168 169 if (!n) 170 { 171 // if n has no value, there is problems... 172 //fprintf (stderr, "NOT NORMAL thresholdValue = 160\n"); 173 thresholdValue =160; 174 goto L; 175 } 176 177 // do the otsu global thresholding method 178 fmax =-1.0; 179 n1 =0; 180 for (k =0; k <255; k++) 181 { 182 n1 += ihist[k]; 183 if (!n1) { continue; } 184 n2 = n - n1; 185 if (n2 ==0) { break; } 186 csum += k *ihist[k]; 187 m1 = csum / n1; 188 m2 = (sum - csum) / n2; 189 sb = n1 * n2 *(m1 - m2) * (m1 - m2); 190 /* bbg: note: can be optimized. */ 191 if (sb > fmax) 192 { 193 fmax = sb; 194 thresholdValue = k; 195 } 196 } 197 198 L: 199 for (i =0; i < h; i++) 200 { 201 np = (unsigned char*)(image->imageData + image->widthStep*i); 202 for (j =0; j < w; j++) 203 { 204 if(np[j] >= thresholdValue) 205 np[j] =255; 206 else np[j] =0; 207 } 208 } 209 210 //cout<<"The Threshold of this Image in Otsu is:"<<thresholdValue<<endl; 211 return(thresholdValue); 212 } 213 214 /*======================================================================*/ 215 /* 迭代法*/ 216 /*======================================================================*/ 217 // nMaxIter:最大迭代次数;nDiffRec:使用给定阀值确定的亮区与暗区平均灰度差异值 218 int DetectThreshold(IplImage*img, int nMaxIter, int& iDiffRec) //阀值分割:迭代法 219 { 220 //图像信息 221 int height = img->height; 222 int width = img->width; 223 int step = img->widthStep/sizeof(uchar); 224 uchar *data = (uchar*)img->imageData; 225 226 iDiffRec =0; 227 int F[256]={ 0 }; //直方图数组 228 int iTotalGray=0;//灰度值和 229 int iTotalPixel =0;//像素数和 230 byte bt;//某点的像素值 231 232 uchar iThrehold,iNewThrehold;//阀值、新阀值 233 uchar iMaxGrayValue=0,iMinGrayValue=255;//原图像中的最大灰度值和最小灰度值 234 uchar iMeanGrayValue1,iMeanGrayValue2; 235 236 //获取(i,j)的值,存于直方图数组F 237 for(int i=0;i<width;i++) 238 { 239 for(int j=0;j<height;j++) 240 { 241 bt = data[i*step+j]; 242 if(bt<iMinGrayValue) 243 iMinGrayValue = bt; 244 if(bt>iMaxGrayValue) 245 iMaxGrayValue = bt; 246 F[bt]++; 247 } 248 } 249 250 iThrehold =0;// 251 iNewThrehold = (iMinGrayValue+iMaxGrayValue)/2;//初始阀值 252 iDiffRec = iMaxGrayValue - iMinGrayValue; 253 254 for(int a=0;(abs(iThrehold-iNewThrehold)>0.5)&&a<nMaxIter;a++)//迭代中止条件 255 { 256 iThrehold = iNewThrehold; 257 //小于当前阀值部分的平均灰度值 258 for(int i=iMinGrayValue;i<iThrehold;i++) 259 { 260 iTotalGray += F[i]*i;//F[]存储图像信息 261 iTotalPixel += F[i]; 262 } 263 iMeanGrayValue1 = (uchar)(iTotalGray/iTotalPixel); 264 //大于当前阀值部分的平均灰度值 265 iTotalPixel =0; 266 iTotalGray =0; 267 for(int j=iThrehold+1;j<iMaxGrayValue;j++) 268 { 269 iTotalGray += F[j]*j;//F[]存储图像信息 270 iTotalPixel += F[j]; 271 } 272 iMeanGrayValue2 = (uchar)(iTotalGray/iTotalPixel); 273 274 iNewThrehold = (iMeanGrayValue2+iMeanGrayValue1)/2; //新阀值 275 iDiffRec = abs(iMeanGrayValue2 - iMeanGrayValue1); 276 } 277 278 //cout<<"The Threshold of this Image in imgIteration is:"<<iThrehold<<endl; 279 return iThrehold; 280 } 281 282 283 /*===============================核心程序===========================================*/ 284 int main(int argc,char** argv) 285 { 286 IplImage *src,*grayImg; 287 src=cvLoadImage("Lena.jpg",1); 288 grayImg=cvCreateImage(cvGetSize(src),src->depth,1); 289 cvCvtColor(src,grayImg,CV_BGR2GRAY); 290 291 /*===============================图像分割=====================================*/ 292 293 /*手动设置阈值*/ 294 IplImage* binaryImg = cvCreateImage(cvGetSize(src),IPL_DEPTH_8U, 1); 295 cvThreshold(grayImg,binaryImg,71,255,CV_THRESH_BINARY); 296 cvNamedWindow("cvThreshold", CV_WINDOW_AUTOSIZE ); 297 cvShowImage( "cvThreshold", binaryImg ); 298 const char* path1; 299 path1="Threshold.bmp"; 300 cvSaveImage(path1, binaryImg); 301 302 303 /*---------------------------------------------------------------------------*/ 304 /*自适应阀值 //计算像域邻域的平均灰度,来决定二值化的值*/ 305 306 IplImage* adThresImg = cvCreateImage(cvGetSize(src),IPL_DEPTH_8U, 1); 307 double max_value=255; 308 int adpative_method=CV_ADAPTIVE_THRESH_GAUSSIAN_C;//CV_ADAPTIVE_THRESH_MEAN_C 309 int threshold_type=CV_THRESH_BINARY; 310 int block_size=3;//阈值的象素邻域大小 311 int offset=5;//窗口尺寸 312 cvAdaptiveThreshold(grayImg,adThresImg,max_value,adpative_method,threshold_type,block_size,offset); 313 cvNamedWindow("cvAdaptiveThreshold", CV_WINDOW_AUTOSIZE ); 314 cvShowImage( "cvAdaptiveThreshold", adThresImg ); 315 const char* path2; 316 path2="AdaptiveThreshold.bmp"; 317 cvSaveImage(path2, adThresImg); 318 /*---------------------------------------------------------------------------*/ 319 320 321 /*最大熵阀值分割法*/ 322 323 IplImage* imgMaxEntropy = cvCreateImage(cvGetSize(src),IPL_DEPTH_8U,1); 324 MaxEntropy(grayImg,imgMaxEntropy); 325 cvNamedWindow("MaxEntroyThreshold", CV_WINDOW_AUTOSIZE ); 326 cvShowImage( "MaxEntroyThreshold", imgMaxEntropy );//显示图像 327 const char* path3; 328 path3="MaxEntropy.bmp"; 329 cvSaveImage(path3, imgMaxEntropy); 330 331 /*-----------------------------------------------------------------------------*/ 332 333 /*基本全局阀值法*/ 334 335 IplImage* imgBasicGlobalThreshold = cvCreateImage(cvGetSize(grayImg),IPL_DEPTH_8U,1); 336 imgBasicGlobalThreshold=cvCloneImage(grayImg); 337 int pg[256],i,thre; 338 for (i=0;i<256;i++) pg[i]=0; 339 for (i=0;i<imgBasicGlobalThreshold->imageSize;i++) // 直方图统计 340 pg[(byte)imgBasicGlobalThreshold->imageData[i]]++; 341 thre = BasicGlobalThreshold(pg,0,256); // 确定阈值 342 cout<<"The Threshold of this Image in BasicGlobalThreshold is:"<<thre<<endl;//输出显示阀值 343 cvThreshold(imgBasicGlobalThreshold,imgBasicGlobalThreshold,thre,255,CV_THRESH_BINARY); // 二值化 344 cvNamedWindow("BasicGlobalThreshold", CV_WINDOW_AUTOSIZE ); 345 cvShowImage( "BasicGlobalThreshold", imgBasicGlobalThreshold);//显示图像 346 const char* path4; 347 path4="BasicGlobalThreshold.bmp"; 348 cvSaveImage(path4, imgBasicGlobalThreshold); 349 350 /*----------------------------------------------------------------------------------------*/ 351 352 /*OTSU*/ 353 354 IplImage* imgOtsu = cvCreateImage(cvGetSize(grayImg),IPL_DEPTH_8U,1); 355 imgOtsu=cvCloneImage(grayImg); 356 int thre2; 357 thre2 = otsu(imgOtsu); 358 cout<<"The Threshold of this Image in Otsu is:"<<thre2<<endl;//输出显示阀值 359 cvThreshold(imgOtsu,imgOtsu,thre2,255,CV_THRESH_BINARY); // 二值化 360 cvNamedWindow("imgOtsu", CV_WINDOW_AUTOSIZE ); 361 cvShowImage( "imgOtsu", imgOtsu);//显示图像 362 const char* path5; 363 path5="Otsu.bmp"; 364 cvSaveImage(path5, imgOtsu); 365 366 /*-------------------------------------------------------------------------------------------*/ 367 /*上下阀值法:利用正态分布求可信区间*/ 368 IplImage* imgTopDown = cvCreateImage( cvGetSize(grayImg), IPL_DEPTH_8U, 1 ); 369 imgTopDown=cvCloneImage(grayImg); 370 CvScalar mean ,std_dev;//平均值、 标准差 371 double u_threshold,d_threshold; 372 cvAvgSdv(imgTopDown,&mean,&std_dev,NULL); 373 u_threshold = mean.val[0] +2.5* std_dev.val[0];//上阀值 374 d_threshold = mean.val[0] -2.5* std_dev.val[0];//下阀值 375 cout<<"The TopThreshold of this Image in TopDown is:"<<d_threshold<<endl;//输出显示阀值 376 cout<<"The DownThreshold of this Image in TopDown is:"<<u_threshold<<endl; 377 cvThreshold(imgTopDown,imgTopDown,d_threshold,u_threshold,CV_THRESH_BINARY_INV);//上下阀值 378 cvNamedWindow("imgTopDown", CV_WINDOW_AUTOSIZE ); 379 cvShowImage( "imgTopDown", imgTopDown);//显示图像 380 const char* path6; 381 path6="TopDown.bmp"; 382 cvSaveImage(path6, imgTopDown); 383 384 /*---------------------------------------------------------------------------*/ 385 /*迭代法*/ 386 IplImage* imgIteration = cvCreateImage( cvGetSize(grayImg), IPL_DEPTH_8U, 1 ); 387 imgIteration=cvCloneImage(grayImg); 388 int thre3,nDiffRec; 389 thre3 =DetectThreshold(imgIteration, 100, nDiffRec); 390 cout<<"The Threshold of this Image in imgIteration is:"<<thre3<<endl;//输出显示阀值 391 cvThreshold(imgIteration,imgIteration,thre3,255,CV_THRESH_BINARY_INV);//上下阀值 392 cvNamedWindow("imgIteration", CV_WINDOW_AUTOSIZE ); 393 cvShowImage( "imgIteration", imgIteration); 394 const char* path7; 395 path7="Iteration.bmp"; 396 cvSaveImage(path7, imgIteration); 397 398 399 400 401 /*---------------------------------------------------------------------------*/ 402 /*释放内存空间*/ 403 cvReleaseImage(&imgIteration); 404 cvReleaseImage(&imgTopDown); 405 cvReleaseImage(&imgOtsu); 406 cvReleaseImage(&imgBasicGlobalThreshold); 407 cvReleaseImage(&imgMaxEntropy ); 408 cvReleaseImage(&adThresImg); 409 cvReleaseImage(&binaryImg); 410 cvWaitKey(0);return 0; 411 }
运行结果:
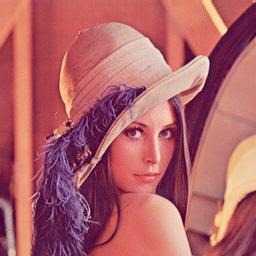


Orignal Img Threshold Img AdaptiveThreshold Img



BasicGlobalThreshold MaxEntropy Otsu

TopDown Iteration
Hai
0730
标签:
原文地址:http://www.cnblogs.com/gaohai/p/5715536.html
