标签:
接触SLAM有半年左右,这段时间,我们跟进最新的开源算法,并根据实际情况修改了一些算法源码,实现机器人的slam、路径规划和避障行为。而我也从一个距离门口18条大街的小白顺利入了门。
之前由于基础薄弱,对计算机视觉、SLAM、机器人导航的一些概念不太明确,导致在选方案和传感器的时候,大方向有点模糊,没能跳出局部看全局,走了一些弯路。随着学习的深入,对一些基础知识也有了相对清晰的概念,最近试着梳理了一下相关的东西,也算是自己总结。
先祭出一张我自己徒手画的框图:
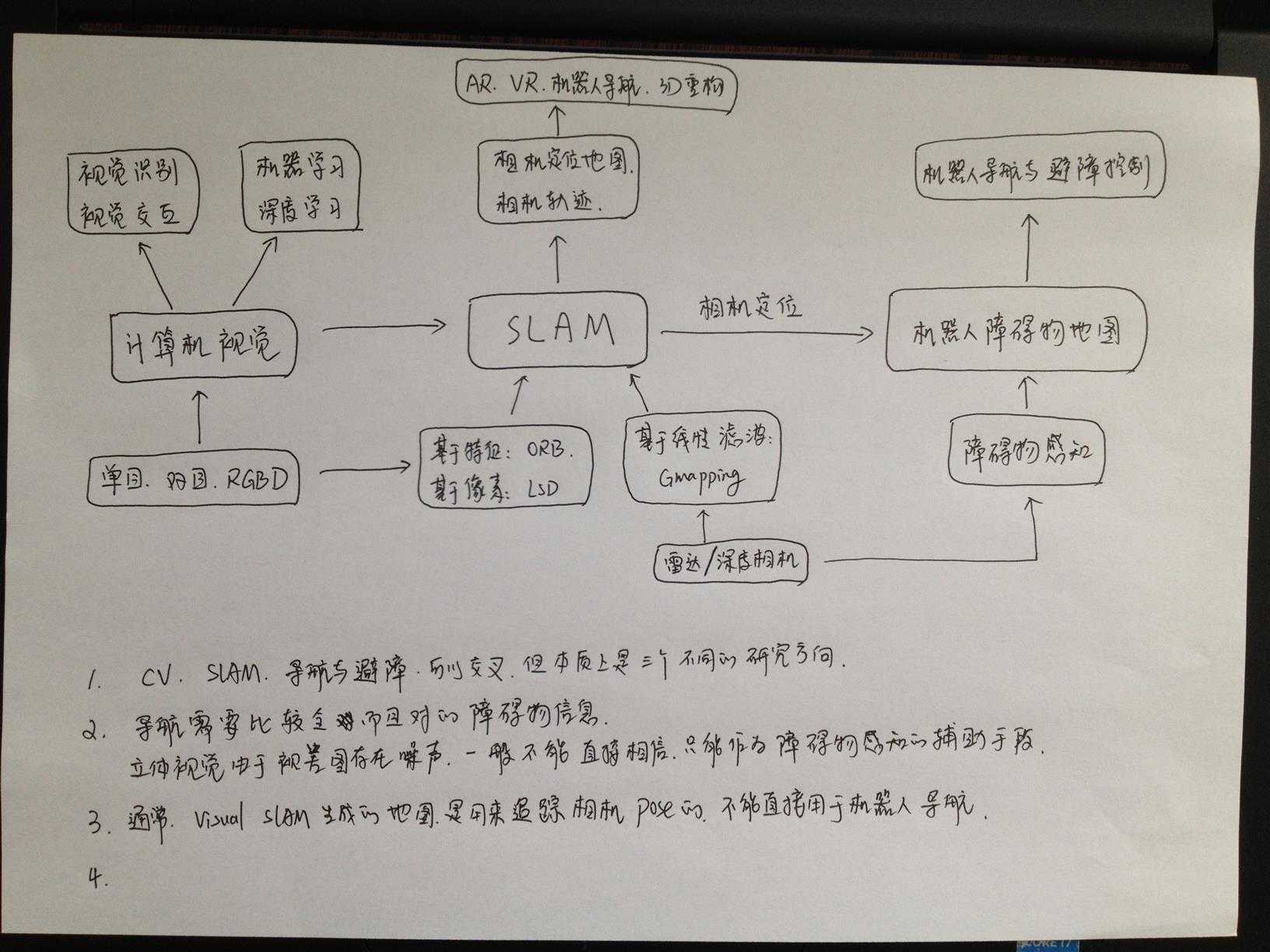
1、之前一直认为,机器人导航用的地图就应该是SLAM输出的地图,但在图优化时代,visual slam输出的地图,似乎只是用来追踪摄像机轨迹的。机器人在获得相机pose后,需要借助其他传感器,如激光雷达等,来构建导航端需要的障碍物地图。也就是说,导航用的地图和visual slam输出的地图不用混为一谈。
2、slam是属于计算机视觉的一个分支,如果要用视觉做一些其他的应用,比如一些视觉交互和识别等,由于视觉计算比较消耗资源,在系统硬件架构上不应该与slam放在一起做,本身也应该是两个不同的研究方向和应用场景。
3、cv、slam、机器人导航,会有一些交叉,但是本质上是属于不同的研究方向,各自有各自的方法和难点,如果团队想要做得比较深入,应该三部分研究工作由不同的人来承担。我司现在就略为混乱,基本上每个人都涉及到了这三个方向,这样效率会比较低。
以上是我自己梳理的东西,比较基础,有的也是显而易见的东西,若有错误的地方,希望看到的朋友能不吝赐教。越学习越感觉自己的无知,需要学习的东西太多了。
标签:
原文地址:http://www.cnblogs.com/leefeng/p/5721504.html