标签:
1.向量空间和子空间
 :包含所有n维的列向量(之所以使用R:列向量的元素都是实数)
:包含所有n维的列向量(之所以使用R:列向量的元素都是实数)
在所有向量空间内都支持的操作:

?
实数向量空间:

8个规则:
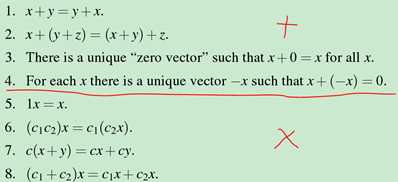
用的较多的还是向量空间和子空间的定义,即乘法和加法的结果仍在集合内。子空间也是向量空间
相反的方面,若一个集合不能构成向量空间,则这个集合的元素相加或相乘的结果可能不在这个集合内。
子空间:
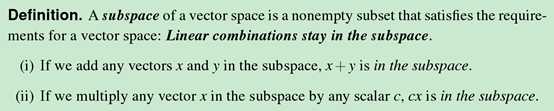
零向量是任何向量空间的子空间。
最小的子空间仅由一个向量构成:0向量。称作0维空间。向量空间不允许是空集。
最大的子空间就是原始的向量空间本身。
3维空间的子空间:

子空间可以缩小维度(由上图),但实质都是从原始空间点集抽出的一个子集和,集合中的元素都来自原始集合。
?
列向量空间:

注意向量空间的原子是‘列‘(概念上的列,列实际可以是各种形式,如一个函数,一个矩阵)。
?
方程解与列向量空间的联系:

对于
Ax = b can be solved if and only if b lies in the plane that is spanned(标定) by the two column vectors .这个plane就是A的列向量空间,同时也是 的子空间(过0点)。这个plane是
的子空间(过0点)。这个plane是 的子空间的证明 p89
的子空间的证明 p89
C(A):A的列向量空间,是 的子空间,证明p89。注意
的子空间,证明p89。注意 是我们讨论各种问题所在的全集,就类似与1属于自然数n这种关系。
是我们讨论各种问题所在的全集,就类似与1属于自然数n这种关系。
N(A):A的nullspace,是 的子空间,证明:
的子空间,证明:

x+x‘在nullspace内,cx也在nullspace内,所以x的全集是 的子空间
的子空间
注意一开始用 举线性组合的例子,A里只有两列(这种情况就高斯消元法来讲一定是奇异的情况,pivots个数不够!),这时候列向量空间是个面,A中也可以有三列的------》then?
举线性组合的例子,A里只有两列(这种情况就高斯消元法来讲一定是奇异的情况,pivots个数不够!),这时候列向量空间是个面,A中也可以有三列的------》then?
?
Nullspace:

注意:之前说的向量空间都是由b直接构成,nullspace似乎不是这样,它是由构成0向量空间的线性组合的系数构成的,有点区别,如果A=I的话C(A),N(A)两者是一样的,还有如果A的列数小于行数的话似乎看b更直观一些。
?
独立,或者说成线性无关。
?
了解C(A)和N(A)的目的:

?
?
问题集合:
 的子空间由四种类型:
的子空间由四种类型: 本身,面,线,零。
本身,面,线,零。


[??]B的列向量空间已经和A的不同了,列向量空间和解是什么关系呢?C的列向量空间仍和A一致。
列向量空间和nullspace的关系,进一步和complete solution的关系,见一下节,在解方程的时候做基本变换虽然改变了列向量空间,但是解是没有变的。
4.a能由两个向量唯一确定,但是不能由三个向量唯一确定
.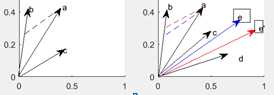
c和d可以确定任意多个向量如e和e‘,e再和b确定a.

除非b在A的向量空间内,由上面第二图可知,添加了一个仍在A的向量空间内的d仍是可解的。

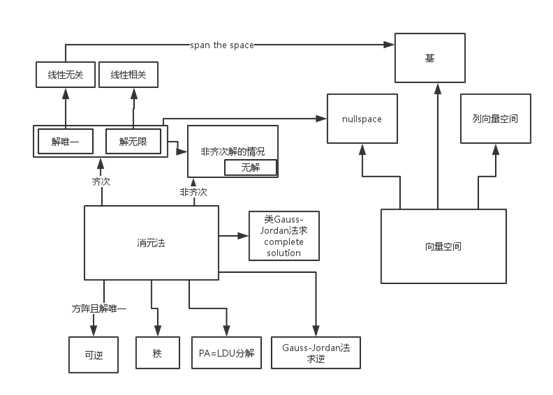
2.解Ax=0和Ax=b
对于可逆矩阵来说,Ax=0的解只有x=0,Ax=b对于任意b都有解。当nullspace里出现了非零解或者A的列向量空间小于 是我们这节要处理的情况。
是我们这节要处理的情况。
?
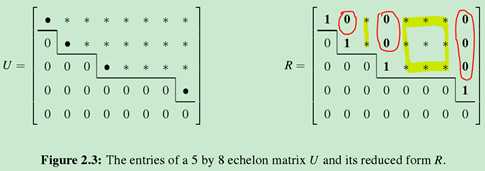
梯队形式(echelon form):

因为我们使用消元法获得U,将之按照相反的过程还原,自然可以得到原来的矩阵A,因此:
L是方阵,行数等于A和U的行数
PA=LU是一般形式:

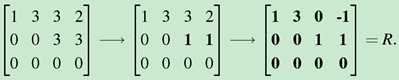
获取R: 1.将U的pivots化成1 2.从下往上将pivots正上方的元素化成0,如下:
* matlab里获取R R=rref(A),对于可逆矩阵,R=I (rref:reduced row echelon form)
上章中是PA=LDU,Gaus-Jordan方法中[A I]->[U L逆]->[I A逆],涉及A->U,pivots上方元素化0等,求R的方法虽然和这两个方法神似,但是并不是一个方法,问题的出发点并不相同。
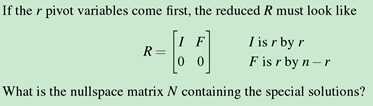
R still contains an identity matrix.in the pivot rows and pivot columns.
Rx=0 Ux=0 Ax=0 具有相同的解,虽然在变换的时候方程式改变了,但是方程解的交集没有改变。
pivot variables: variables(in vector x) correspond to columns with pivots
Free variables: variables(in vector x) correspond to columns without pivots
从下面可以看出,在对x的表示中pivot varialbes全部由free variables表示了。而free variables之所以叫free variables,是因为这些变量是可以任意取值的。
?
运用R求Ax=0:
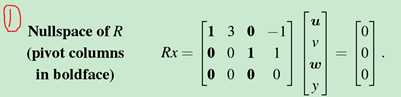

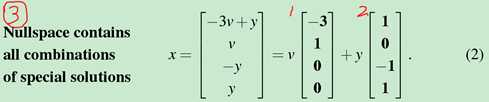
Special solutions for Ax=0:就是③中右侧的每一列是一个special solution.
A的nullspace可以看成special solutions的combination的集合
在上例中,A的nullspace是 2维 的向量空间。
注意:仔细观察,special solutions的个数等于free variables的个数
发现没,special solutions是相互独立的
对于A(m by n,n>m)来说,至少有n-m个free variables.
一个非常重要的结论:

从解Rx=0的过程可知,每多出一个free variables,就会多出一个special solution,对于A(m by n,n>m)来说,至少有n-m个free variables,这也是得出2C的原因。又因为free variables可以任意取值,所以解的个数是无限个。
?


Solving Ax = b, U x = c, and Rx = d
和Ax=0中不同的一点:即使n>m(more unkonwns than equations),也不一定有解。主要是方程右边的b!=0造成了方程的平行(b=0的时候方程重合)。
?
讲解这个问题的顺序:
求Ax=b:
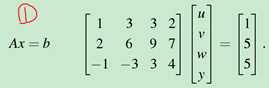


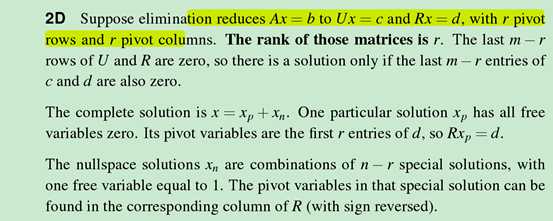
结论:
Every solution to Ax = b is the sum of one particular solution and a solution to Ax = 0:

关于 ,可以将b看成0+b,按照上节方法b=0的部分的解为
,可以将b看成0+b,按照上节方法b=0的部分的解为 ,b=b的部分的解为
,b=b的部分的解为 。
。 。(由现象到结论,这是一种推广)
。(由现象到结论,这是一种推广)

当b=0时也有特解,只不过特解是0.
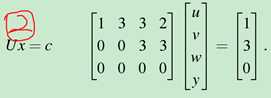
将Ax=b化成Rx=d之后就可以直接得出结论,注意这个方法,连同上一节的直接获取结果的方法(就是直接看R就给出结果的方法,R中的列直接对应到special solutions):
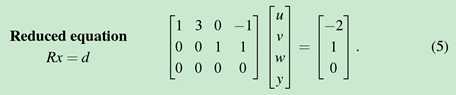
D中值对应到pivot variable对应位置的特解,特解中free variable对应位置为0.free variable columns对应到special solution里。
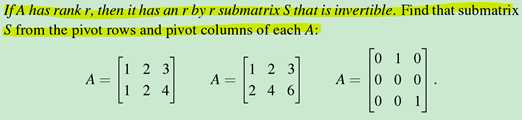
Rank of the matrix: 矩阵的秩

?
You see how the rank r is crucial. It counts the pivot rows in the "row space" and the
pivot columns in the column space. There are n ? r special solutions in the nullspace.
There are m ? r solvability conditions on b or c or d(之所以这么说,是因为剩下的m-r行决定方程是否有解).
?


?
问题集合:
1.
方程无解的时候仍可以有nullspace,此时有 但是无
但是无 .
.
2.
 ans:
ans: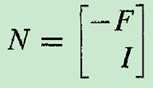
3.
也就是说pivot columns所在的列是线性无关的列
4.[??]

小于A好证(AB的结果是A的线性组合,逃不出A所在的‘plane‘),小于B呢:行秩等于列秩,AB中每一行都是B的所有行的一个线性组合,其行秩必然小于B
5.注意若AB=I,在AB不为方阵的时候也可以成立,定义左逆右逆的公式中都是指的方阵,不是方阵的情况下左逆不等于右逆(维数都不相同),逆的定义中是同时满足左逆右逆才叫逆。

6.

7.[!!]

8. A system Ax=b has at most one particular solution:错。它的任意解都可以认做是一个特解。只要Xp+Xn=X成立就可以。
9.解的情况大概也就这么多了
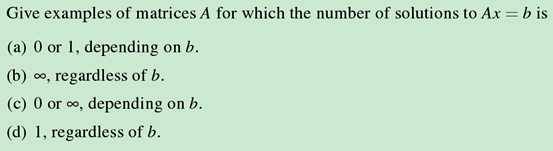
(a)rows>rank(A),columns=rank(A) (b).rows=rank(A),columns>rows (c)rows>rank(A),columns>rank(A) (d) invertible
10.
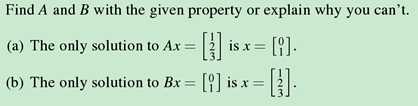
用上面的结论很容易就可以做出来:(a)秩为2且有解即是 (b)秩小于列数,无解或无限解。
?
?
11.

方程组相交成点,方程组中没有未知量,相交成线,有一个未知量,因此秩是3.
(b)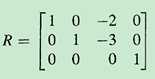
12. 处于后列的pivot variable是无法使用处于前列的free variable来构成自己的。
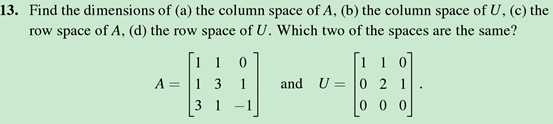
13.why does no 3 by 3 matrix have a nullspace that equals its column space
可逆时:nullspace只有一个元素,column space为
秩为2时:nullspace是线,column space是面
秩为1时:nullspace是面,column space是线
?
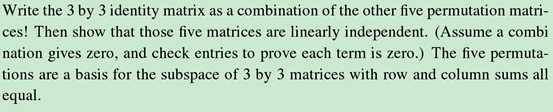
3.线性无关(独立),基(basis)和维度
linear independence和linear dependence:

从列向量的角度来看线性相关:至少有一个维度无法用列向量的combination表示。或者说列向量空间比 (max(m,n))至少少一维。
(max(m,n))至少少一维。
从解方程的角度来看线性相关:方程无解或者无限解,方程图形无交点或者至少相交于线。
A random choice of three vectors,without any special accident,should produce linear independence.也是,随机的三个向量落到同一平面的概率是很小的。

考虑消元法产生的上三角矩阵,解一定是0.这个角度比较容易理解。
Pivots所在的行和列是相互独立的


事实上即使没有线代的知识我们也有类似的经验:方程组中有n个未知量m个等式,m<n,最终肯定得不到唯一解。
?
Span a space:

没有说对每一个v,c的序列都是唯一的
Spaning a space的例子: 
Spanning involves the column space and independence involves the nullspace.
?
空间V的基(basis)

这意味着:
1.向量空间内每一个向量都是基的一个组合
2.

但是基不是唯一的,一个向量空间可以有无限个基
?
选择基的方法:

注意,是pivots所在的未变换之前的列,变换后的列向量空间可能会发生变化,虽然这不会影响对应列的线性无关性。
?
在考虑列向量空间的基的问题时是不关注矩阵的形状的(形状对线性相关性没有影响)。但是如果列向量空间是 ,那这个矩阵一定是方阵且可逆。
,那这个矩阵一定是方阵且可逆。
向量空间的维度:

0矩阵的列向量空间仅包含0向量。依照惯例,它的基是空集,维度为0;
一个向量空间有无限个基,但是每个基由相同个数的向量组成。

后一句应该是less than吧(下面这种说法也说明应该是less than)

基是最大的线性无关集,也是最小的spanning set.
注意:向量空间(子空间)的维度和向量的维度不是一回事。4维的向量空间可以由6维向量构成。6维向量空间内可以有4维的子空间,当然其向量维数至少大于6.
?
问题集合:
1.基的定义: x的基,再者从线性相关性导出,考虑问题请回到出发点。
2.同维向量v1,v2,v3,v4,其中v1,v2,v3线性无关,是一个三维向量空间的基,因为三维向量空间内任意4个向量一定线性相关,所以v1~v4线性相关。
以上逻辑肯定不对的,首先要确定v4在上面的向量空间内才可以,否则的话线性无关。。。如果v是三维向量的话上面的话是正确的,因为隐含了形成的向量空间为 ,v4一定在
,v4一定在 内。
内。
?
4.

秩为1,有三个free variable,所以解是由三个special solution的组合。
5.

6.
rref(A)=左图,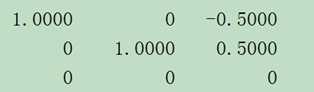 所以前两列是相互独立的,主要是前两列所在的面和U的前两列所在的面不同,这和秩什么的都没有关系,就是确定的空间不同。
所以前两列是相互独立的,主要是前两列所在的面和U的前两列所在的面不同,这和秩什么的都没有关系,就是确定的空间不同。
c和d在同一个面内
?
7.虽然行秩等于列秩,但是行向量空间和列向量空间却不一定要有什么联系。
8.
9.
[??]10.

pivot cloumns是线性无关的,pivot rows也是线性无关的,主要是pivot rows是线性无关的,这个该怎么理解
?
11.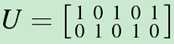 找出U的行向量空间所在的基:它的基肯定都在两个行向量确定的平面上。因为row1和row2是相互独立的,所以row1,row2是一个基,row1,row2+row1是一个基
找出U的行向量空间所在的基:它的基肯定都在两个行向量确定的平面上。因为row1和row2是相互独立的,所以row1,row2是一个基,row1,row2+row1是一个基
12.special solutions是相互独立的

这个plane指的就是nullspace,最现成的基就是special solutions
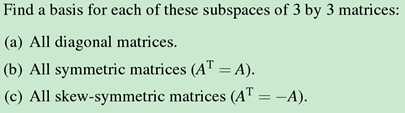
第二问可以把xy面加到方程组里:0x+0y+z=0;
第三问就是所有平行于面的法向量的向量构成的向量空间,基应该就是法向量
?
13.

就比如 的二维子空间,可以有好多个,而且每个都对应一个基,并且不同的子空间对应的基是不同的,而[v1 v2 v3 v4]的二维基只有6个,所以无论如何不能对应到这么多子空间上。
的二维子空间,可以有好多个,而且每个都对应一个基,并且不同的子空间对应的基是不同的,而[v1 v2 v3 v4]的二维基只有6个,所以无论如何不能对应到这么多子空间上。
?
[??]14.

15.

又做一遍,有多少free variable就有多少special solution,special solution是独立的。
?
16.
17.

可以认为F3中的向量为(Acosx,Bcos2x,Ccos3x),现在因x=0,向量变成(A,B,C),且满足A+B+C=0;令A,B,C分别为x,y,z,则(A,B,C)形成的向量空间就是[1 1 1]的nullspace,要求的就是其special solutions.
?
18.

ans:
注意和17.的区别:17.使用一个函数式说明其向量空间,18.用几个函数式(向量)说明其向量空间。
?
19.
ans:
?
标签:
原文地址:http://www.cnblogs.com/wangxiaotao/p/5734867.html