标签:
1准备材料,

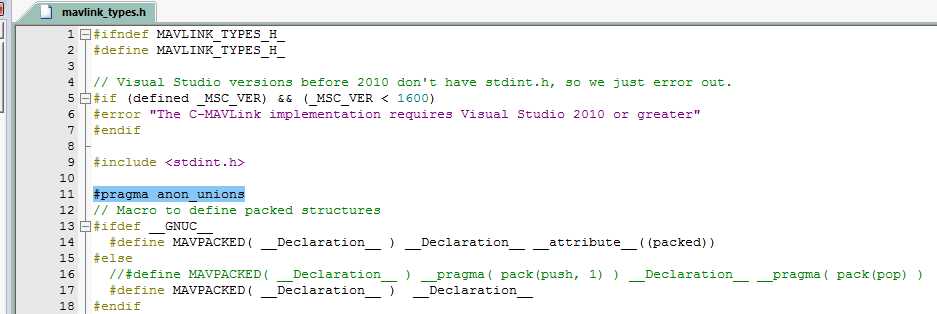
#define MAVPACKED( __Declaration__ ) __pragma( pack(push, 1) ) __Declaration__ __pragma( pack(pop) )
#define MAVPACKED( __Declaration__ ) __Declaration__

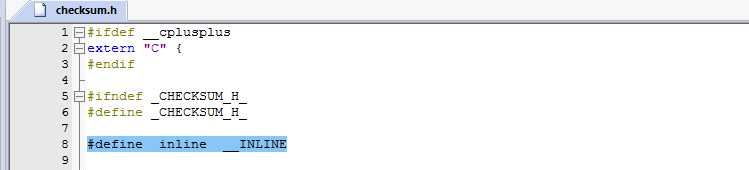
#define inline __INLINE
MAVLINK_HELPER void mavlink_dcm_to_quaternion(const float dcm[3][3], float quaternion[4]){float tr = dcm[0][0] + dcm[1][1] + dcm[2][2];if (tr > 0.0f) {float s = sqrtf(tr + 1.0f);quaternion[0] = s * 0.5f;s = 0.5f / s;quaternion[1] = (dcm[2][1] - dcm[1][2]) * s;quaternion[2] = (dcm[0][2] - dcm[2][0]) * s;quaternion[3] = (dcm[1][0] - dcm[0][1]) * s;} else {/* Find maximum diagonal element in dcm* store index in dcm_i */int dcm_i = 0;int i;for (i = 1; i < 3; i++) {if (dcm[i][i] > dcm[dcm_i][dcm_i]) {dcm_i = i;}}int dcm_j = (dcm_i + 1) % 3;int dcm_k = (dcm_i + 2) % 3;float s = sqrtf((dcm[dcm_i][dcm_i] - dcm[dcm_j][dcm_j] -dcm[dcm_k][dcm_k]) + 1.0f);quaternion[dcm_i + 1] = s * 0.5f;s = 0.5f / s;quaternion[dcm_j + 1] = (dcm[dcm_i][dcm_j] + dcm[dcm_j][dcm_i]) * s;quaternion[dcm_k + 1] = (dcm[dcm_k][dcm_i] + dcm[dcm_i][dcm_k]) * s;quaternion[0] = (dcm[dcm_k][dcm_j] - dcm[dcm_j][dcm_k]) * s;}}
MAVLINK_HELPER void mavlink_dcm_to_quaternion(const float dcm[3][3], float quaternion[4]){int dcm_j,dcm_k;float s;float tr = dcm[0][0] + dcm[1][1] + dcm[2][2];if (tr > 0.0f) {float s = sqrtf(tr + 1.0f);quaternion[0] = s * 0.5f;s = 0.5f / s;quaternion[1] = (dcm[2][1] - dcm[1][2]) * s;quaternion[2] = (dcm[0][2] - dcm[2][0]) * s;quaternion[3] = (dcm[1][0] - dcm[0][1]) * s;} else {/* Find maximum diagonal element in dcm* store index in dcm_i */int dcm_i = 0;int i;for (i = 1; i < 3; i++) {if (dcm[i][i] > dcm[dcm_i][dcm_i]) {dcm_i = i;}}dcm_j = (dcm_i + 1) % 3;dcm_k = (dcm_i + 2) % 3;s = sqrtf((dcm[dcm_i][dcm_i] - dcm[dcm_j][dcm_j] -dcm[dcm_k][dcm_k]) + 1.0f);quaternion[dcm_i + 1] = s * 0.5f;s = 0.5f / s;quaternion[dcm_j + 1] = (dcm[dcm_i][dcm_j] + dcm[dcm_j][dcm_i]) * s;quaternion[dcm_k + 1] = (dcm[dcm_k][dcm_i] + dcm[dcm_i][dcm_k]) * s;quaternion[0] = (dcm[dcm_k][dcm_j] - dcm[dcm_j][dcm_k]) * s;}}
MAVLINK_HELPER uint16_t mavlink_msg_to_send_buffer(uint8_t *buffer, const mavlink_message_t *msg){memcpy(buffer, (const uint8_t *)&msg->magic, MAVLINK_NUM_HEADER_BYTES + (uint16_t)msg->len);uint8_t *ck = buffer + (MAVLINK_NUM_HEADER_BYTES + (uint16_t)msg->len);ck[0] = (uint8_t)(msg->checksum & 0xFF);ck[1] = (uint8_t)(msg->checksum >> 8);return MAVLINK_NUM_NON_PAYLOAD_BYTES + (uint16_t)msg->len;}
MAVLINK_HELPER uint16_t mavlink_msg_to_send_buffer(uint8_t *buffer, const mavlink_message_t *msg){uint8_t *ck;memcpy(buffer, (const uint8_t *)&msg->magic, MAVLINK_NUM_HEADER_BYTES + (uint16_t)msg->len);ck = buffer + (MAVLINK_NUM_HEADER_BYTES + (uint16_t)msg->len);ck[0] = (uint8_t)(msg->checksum & 0xFF);ck[1] = (uint8_t)(msg->checksum >> 8);return MAVLINK_NUM_NON_PAYLOAD_BYTES + (uint16_t)msg->len;}
#define _MAV_RETURN_char(msg, wire_offset) (const char)_MAV_PAYLOAD(msg)[wire_offset]#define _MAV_RETURN_int8_t(msg, wire_offset) (const int8_t)_MAV_PAYLOAD(msg)[wire_offset]#define _MAV_RETURN_uint8_t(msg, wire_offset) (const uint8_t)_MAV_PAYLOAD(msg)[wire_offset]
#define _MAV_RETURN_char(msg, wire_offset) (const char)_MAV_PAYLOAD(msg)[wire_offset]#define _MAV_RETURN_int8_t(msg, wire_offset) (int8_t)_MAV_PAYLOAD(msg)[wire_offset]#define _MAV_RETURN_uint8_t(msg, wire_offset) (uint8_t)_MAV_PAYLOAD(msg)[wire_offset]
标签:
原文地址:http://www.cnblogs.com/lovechen/p/5801679.html