标签:
1. 基本概念
地物的类:具有同种特性的地物集合称为一类。
一类地物具有同一标志,不同种类地物具有不同的光谱特性(地物反射和发射电磁波能量的能力)
分类:根据各类样本内在的相似性,采用某种判决准则,将特征空间分割成若干集合 的过程。
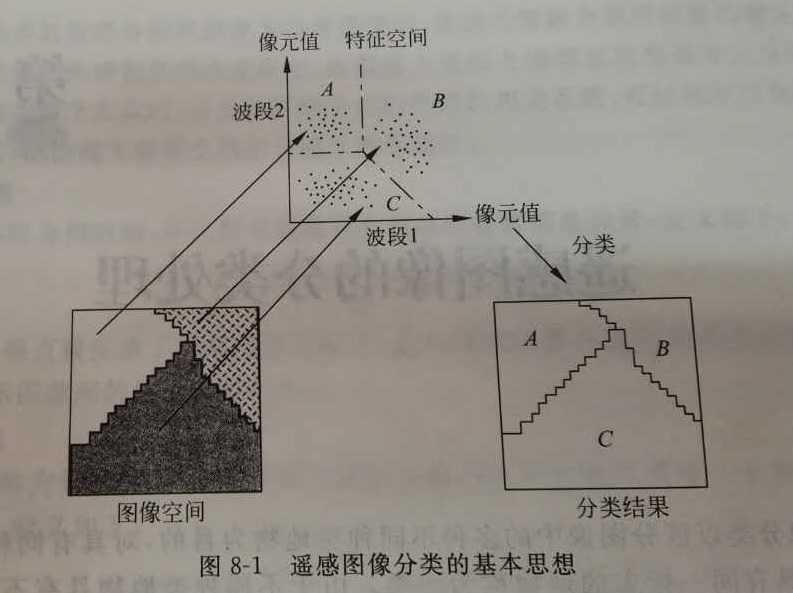
2. 基本思想
区分不同地物的理论依据:不同的地物类型具有不同的光谱信息和空间信息。
3. 多光谱图像的表示方法:
假设某个多光谱图像包括n个波段,则对于任一位置(i , j)的像素的亮度值,可以用矢量x=(x1, x2, …, xn)来表示,其中每个分量xi代表该像素在第i个波段的亮度值。
于是这个多光谱图像就可以用在n维特征空间的一系列点来表示。
但是,由于地物的各种状态和成像时的各种干扰因素,导致传感器获得的每类地物的光谱响应特性并不完全相同。
所以同一类的地物样本,在光谱空间中,表现为如下形式:
围绕某一点呈概率分布或聚集于某一点周围。
4. 基本流程
定义分类类别->特征选择与提取->训练数据的采样->统计特性评估->分类->分类结果分析
光谱特征是遥感图像分类时广泛使用的特征。
5. 分类
{无监督分类
{基于像元的分类
{有监督分类
图像分类
{面向对象的分类
无监督分类:没有先验类别信息,事先不知道分成几类,仅依据像元间相似度的大小进行归类合并的方法;
有监督分类:需要徐选取若干可明确辨认的地物类别的训练区域;
在该区域中进行训练数据的采样;
用采样的数据进行统计分布特性分析,获取对象类别的统计分布特性;
根据得到的特性对其他像素进行分类处理。
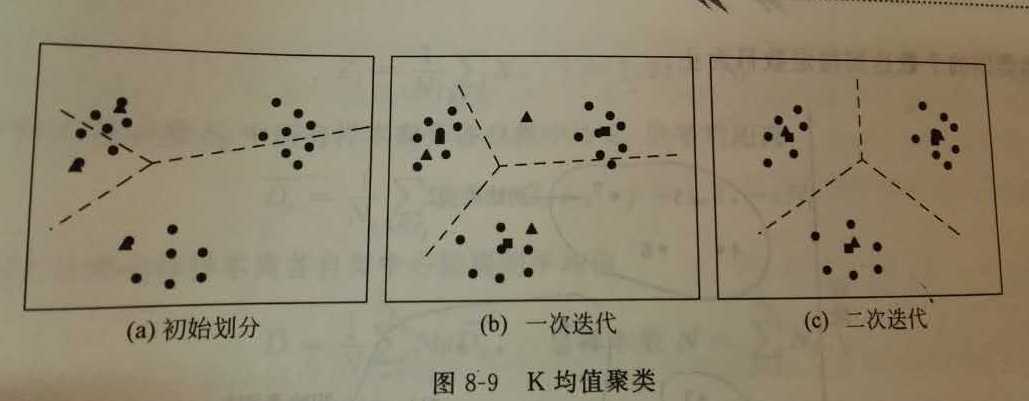
下面说下个人感觉理解起来比较简单的无监督分类的K均值算法:
步骤:
(1) 给定n个初始类的中心位置;
(2) 计算每一像素到所有类中心的距离,并将该像素重新划分到最近的类中;
(3) 更新各类中心;
(4) 重复(2)和(3),知道中心位置未发生较大变化。
特点:事先给出类别数(自己估)、局部最优、动态聚类。
6. 面向对象的遥感图像分类
(1) 首先提一下基于像元的遥感图像分类的缺陷:
1) 难以克服“同谱异物”与“同物异谱”等光谱信息的局限性;
2)影像上一个像元的值包含来自于邻近像元对应地表的信号。
(2)流程:
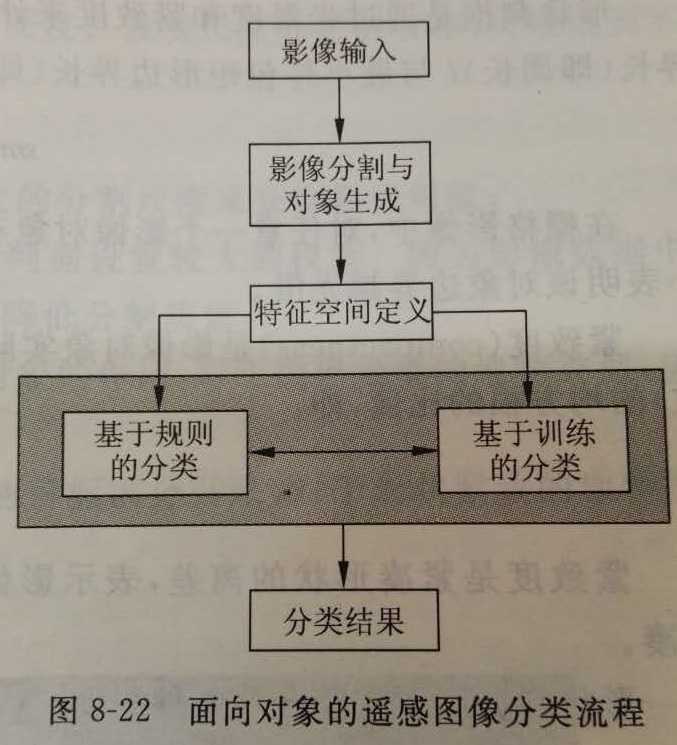
(3)图像的分割:
作用:将一幅图像分成若干“有意义”的互不相交的区域,使这些特征在某一区域内表现一致或相似,在不同区域表现出明显的不同。
原理:主要利用光谱特征和形状特征调整对象边界。
公式不好打这里就不打了。。。
分割函数如下:

这里有两个判据,一个是光谱判据,一个是形状判据。是是光谱相对于形状的权重,是用户自己定义的。
光谱判据通过公式计算就行了。
形状判据是通过光滑度(smoothness)和紧致度(compactness)来计算的。
光滑度是对象的周长l与最小外包矩形周长b的比值:smooth=l/b。
紧致度是对象的周长l与对象大小(对象的像素数)的平方根的比值:cpt=l/
形状判据的计算公式为:

其中(在0到1之间)是紧致度判据的用户自定义权值。紧致度判据与光滑度判据根据公式计算就行了。
(4)多尺度分割
定义:从一个像素对象开始进行一个自下而上的区域合并技术。
准备工作:用户指定光谱和形状参数的判据和邻域函数逻辑。
思想:根据定义的这些判据将各个像元扩展为同质区域(上面图像分割完成的工作)。
这是一个聚集过程。每一步骤中相邻的对象对,只要符合定义的异质的最小生长的标准就合并,如果该合并超出了尺度参数定义的阈值范围,合并过程就停止。(好…好抽象……囧)。
7. 提高分类精度的方法
分类精度低的原因:
(1) 图像分辨率低
(2) 分类特征单一
(3) 分类方法单一
对于分类方法单一会导致分类精度低的原因,主要是不同方法适用于不同特征的地物。对于这个问题的解决方法是:
(1) 多种分类器的融合:比如有监督和无监督的融合;
(2) 采用计算机分类新方法:如模糊分类方法,人工神经网络方法(*),基于知识的分类方法。
对于模糊分类的方法,主要思想就是不考虑“样本x属于B类”,而是考虑“样本x属于B类的程度是多少”。
标签:
原文地址:http://www.cnblogs.com/bjut13062222/p/5859482.html