标签:
本节课主要讲述机器学习怎么解决是非题。
介绍系列课程的第一个模型:perceptron(感知器)
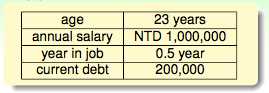
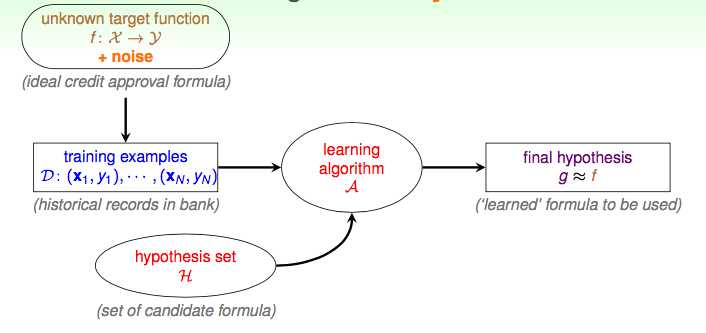
把每一个sample的各种feature用一个向量来表示,也就是下图的x,以上图为例,x1=age, x2=annual salary, x3=year in job, x4=current detb,也就是说在这里,x是一个四维的向量。
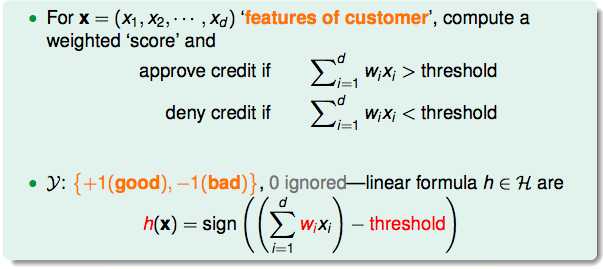
xi表示维度,wi表示该维度的重要性。如果一个人(sample)所有的维度和重要性的乘积加起来,如果总分超过了某一个值(threshold),我们决定这个sample可以通过,反之,则要拒绝掉。如果刚好等于threshold,由于几率极小,这里可以忽略。就像抛银币,竖在那里的几率不是没有,只是很小,算来算去有可能还不如瞎猜一个好。得出的结果叫做y,通过用y=+1表示,没有通过用y=–1表示。我们需要找一个模型出来,输入端是各种x,输出端是各种y。这个模型在这里叫做h(x)。
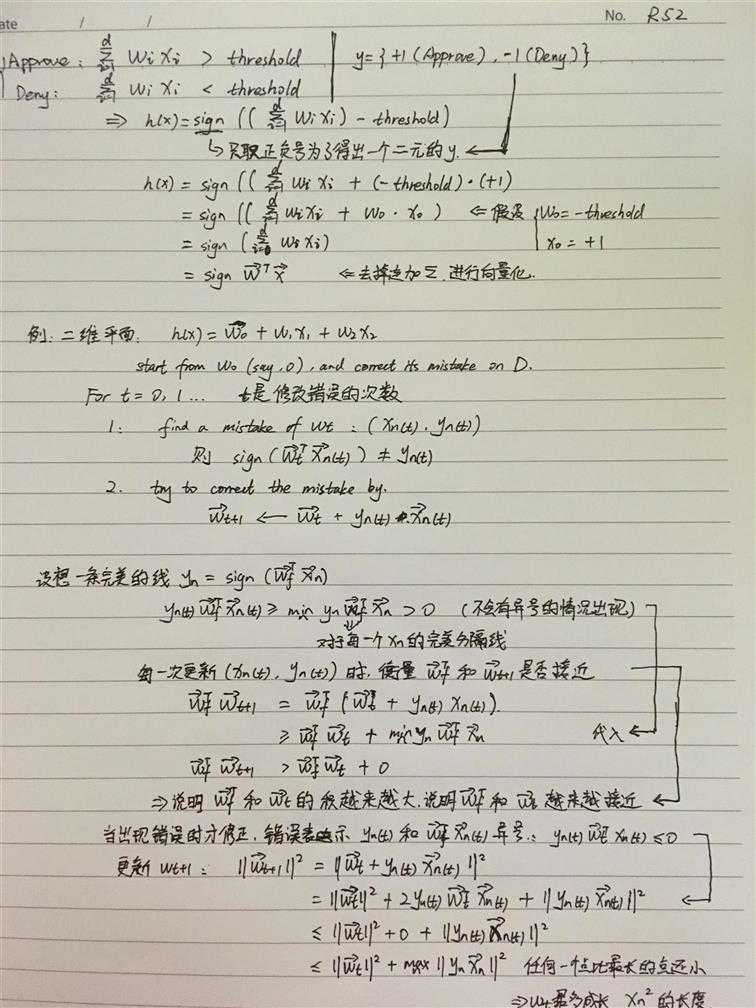
经过数学推导之后得出h(x):
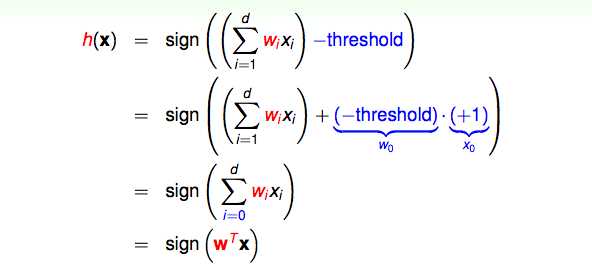
以二维的data为例,h(x)=sign(w0+w1x1+w2x2)
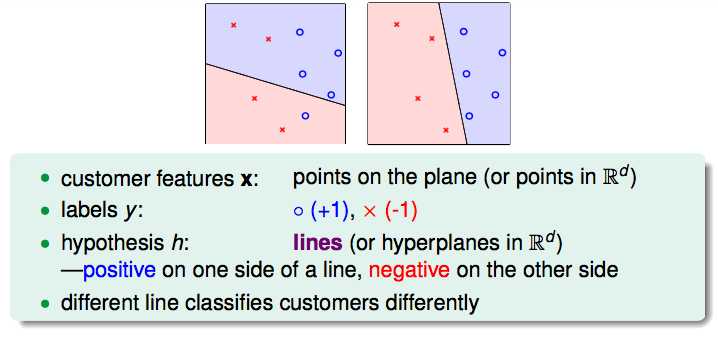
features x就是在平面上的点,因为是二维的所以在平面上,这里可以延伸到更高的维度。
labels y就是图中的圈圈或者叉叉。(因为是二元分类)
hypothesis h就是图中把圈圈和叉叉分开的那条线。(在二维空间是线,三维空间是面,更高维度就是超平面)
假设H是平面内所有的线,我们的目标g是在平面内选一条最好的线。没有输入进模型的data先不管,我们先在已经输入进模型的data中找这么一条线能完美的将两种y分开。那么如何找这条线呢?看起来只有先假设一条不完美的线,通过不断的纠错,把它变得完美。
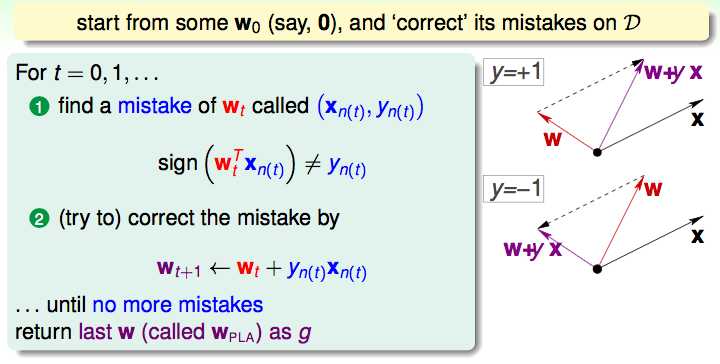
初始的线就设为w0,然后我们要做的事就是不断的修正w0直到它达到能够分开两种y的情况。
t是每次修改的次数。
第一步就是识别是否错误,也就是说这条线的符号和y不一致;
第二部就是修正这个错误,将上一个wt进行修正,并且赋值给wt+1;
第三部就是重复以上步骤,直到没有错误。就是每一个点都进行验证,如果有错误就进行修正,如果没有错误就对下一个点进行验证,直到所有的点都被验证正确。(cyclic PLA)
初始点的选择是随机的,后续验证的时候对点的选择也可以是随机的。

PLA的最大的缺点是要求data必须是线性可分的。
设想一个很完美的线如下:

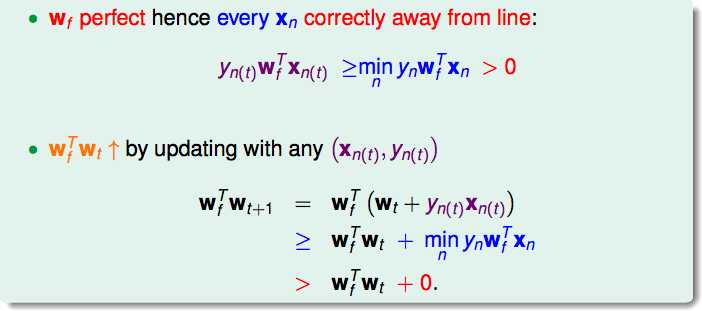
wf和wt越来越接近,因为他们的内积越来越大。
PLA在出现错误的时候就会更新,换成数学表示就是两个相乘是异号的。

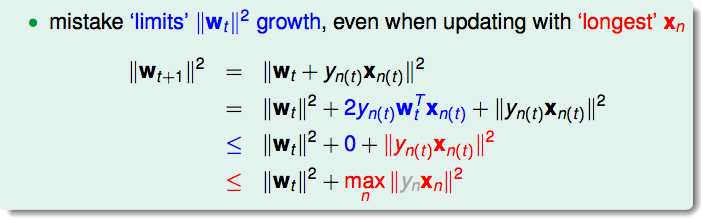
红色部分是wt和wt+1的差别,也就是wt+1在每次犯错之后的变化(成长)。
wt最多成长xn的平方。
两个向量的内积在这里只表示他们越来越靠近,并不是因为他们长度的关系。
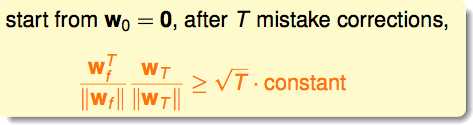
PLA总结:
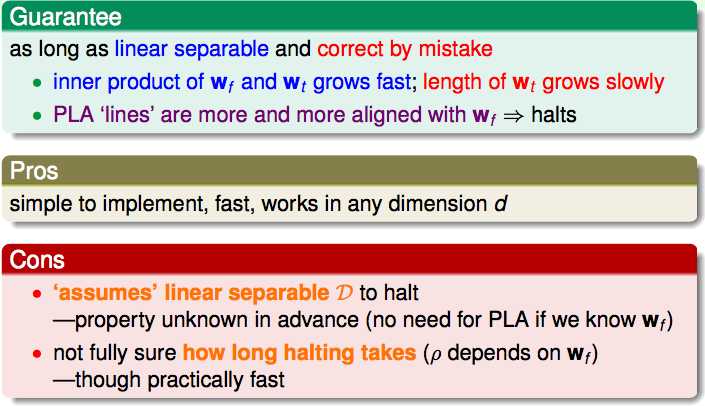
优点:简单易用;
缺点:必须线性可分,不知道什么时候能停下来。
更新Flow:增加了噪声对整体数据的干扰的考虑。大部分时候必须对噪声有一定的容忍。
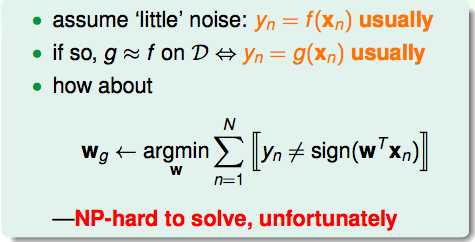
在有噪声的时候,我们的目标从找一条完美的线换成找一条犯错误最少的线。也就是Pocket Algorithm。
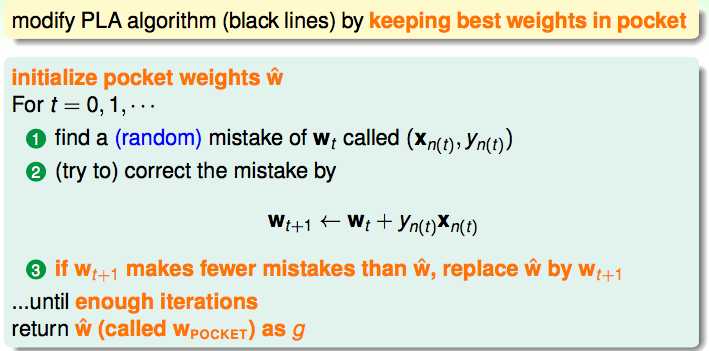
先把当前犯错误最少的线装在pocket里,如果我们遇到了更好的线,则替换掉已经在pocket里的线。但是pocket算法比PLA要慢。
手写的数学推导:
总结:
机器学习基石(2)--Learning to Answer Yes/No
标签:
原文地址:http://www.cnblogs.com/cyoutetsu/p/5909908.html