标签:com 长度 images 地理 理解 如何 多少 坐标系 飞机
作为从未学过惯性导航的小白,四元数折磨了我很长时间,至今也是似懂非懂的。下面说的不正确的,希望大神指点。
四元数说起来很好理解,即表示绕着瞬时轴n旋转θ角度。瞬时轴n=cosαi+cosγj+cosβk。
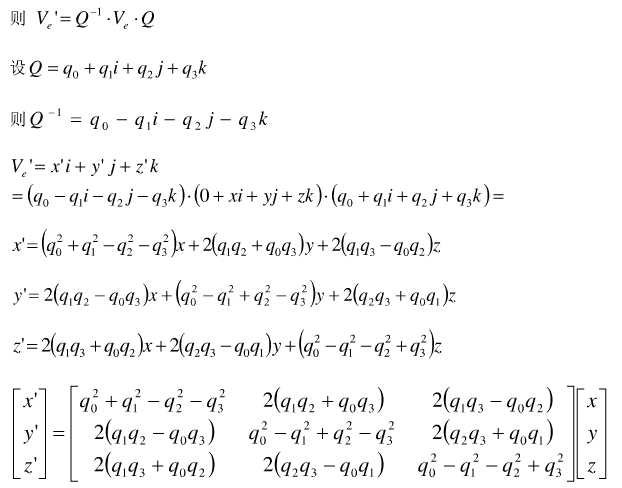
四元数的表示即Q=cos(θ/2)+sin(θ/2)(cosαi+cosγj+cosβk)=q0+q1i+q2j+q3k。姿态矩阵是如何和四元数对应的呢?θ和n是多少呢?
先摆出一个很重要的性质:坐标系旋转,矢量固定不变。坐标系OXYZ按照四元数Q转动,得到新坐标系OXbYbZb,设矢量V在两坐标系中的坐标分别为Ve,Vb。那么有,Vb=Q-1VeQ。具体见http://www.doc88.com/p-893241688972.html
这就是四元数得到旋转矩阵的由来。


这篇文章写的太好了,我就直接复制过来了,感谢作者。
四元数表示旋转矩阵,四元数的微分都说的很清楚了,然而我还是不知道q0,q1,q2,q3跟姿态角到底有什么关系。我想了很久,不知道下面的理解是不是对的。
n的方向就是陀螺仪测得的(wx,wy,wz)矢量和的方向,θ就是(wx,wy,wz)矢量和的长度!!!
wx,wy,wz是飞机绕三个轴旋转的角速度,飞机我们认为是分步骤绕三个轴旋转后到达最终位置的,四元数旋转我们认为是一步旋转到最终位置的。那么这两种旋转肯定有关系啊!四元数是绕一个向量旋转,n表示的是旋转方向,θ表示的是旋转量。wx,wy,wz的旋转其实也是绕三个向量旋转,即(wx,0,0)(0,wy,0)(0,0,wz)。它们最终都到达了同一个位置,那么n当然是(wx,0,0)(0,wy,0)(0,0,wz)三个向量的矢量和啦!
在这里我们一定要认清,向量是与坐标系没有关系的!向量就是向量,是固定的!它只是在不同的坐标系表示的坐标不同罢了!
我们被很多书上的图误导了
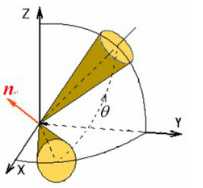
就像这样的图,先入为主的认为n是在地理坐标系的,然后去想飞机是怎么旋转的,怎么想也想不明白!当我们谈到向量,我们一定要认为他是独立的存在空间的,跟坐标系什么关系都没有!
四元数的本质就是,飞机可以看成绕三个向量x,y,z三步旋转到最终位置,也可以看成绕一个向量n一步旋转到最终位置。那么当然n=x+y+z啦,这里是矢量和。
我们始终要牢记:向量是独立的!跟坐标系没有任何关系!
标签:com 长度 images 地理 理解 如何 多少 坐标系 飞机
原文地址:http://www.cnblogs.com/aipan-123456/p/6057131.html