标签:scp node .com robot cat img source 技术 包名
mkdir catkin_ws
cd catkin_ws
mkdir src
catkin_create_pkg Myrobot roscpp rospy
mkdir src
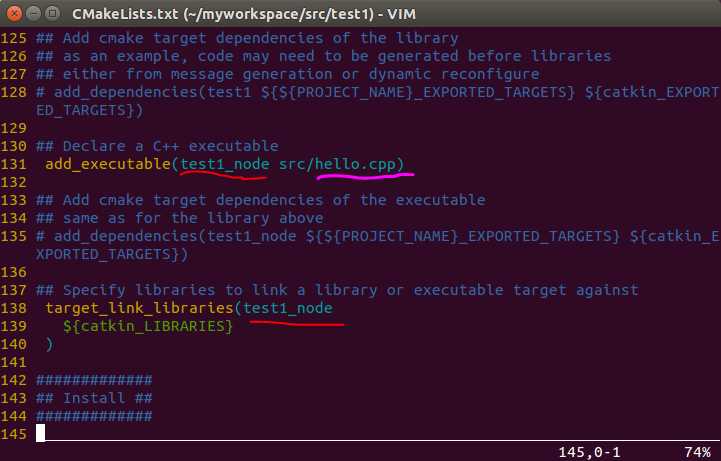
vim hello.cpp
#include <iostream>
int main()
{
std::cout<<"Hello World!"<<std::endl;
return 0;
}
catkin_make
source ./devel/setup.bash
roscore //运行主节点
source catkin_ws/devel/setup.bash
rosrun Myrobot test1_node //Myrobot为包名,test1_node为节点名

标签:scp node .com robot cat img source 技术 包名
原文地址:http://www.cnblogs.com/blue35sky/p/6078771.html