标签:str ios function 应用 bre mon std 入参 凸包
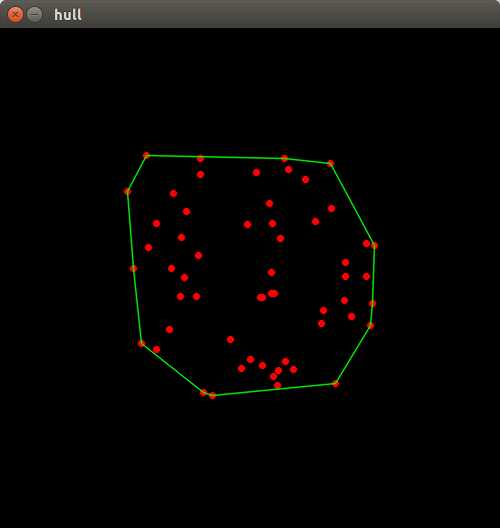
得到了复杂轮廓往往不适合特征的检测,这里再介绍一个点集凸包络的提取函数convexHull,输入参数就可以是contours组中的一个轮廓,返回外凸包络的点集 ---- 如此就能去掉凹进去的边。
对于凸包算法,其中最有名的莫过于Graham扫描算法,它的复杂度为nlog(n)
参考:计算几何之凸包(Algorithm show), 寻找轮廓
高级:Snake模型在轮廓提取中的应用 cvSnakeImage()
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <fstream>
#include <iostream>
using namespace cv;
using namespace std;
static void help()
{
cout << "\nThis sample program demonstrates the use of the convexHull() function\n"
<< "Call:\n"
<< "./convexhull\n" << endl;
}
int main( int argc, char** argv )
{
CommandLineParser parser(argc, argv, "{help h||}");
if (parser.has("help"))
{
help();
return 0;
}
Mat img(500, 500, CV_8UC3);
RNG& rng = theRNG();
for(;;)
{
char key;
int i, count = (unsigned)rng%100 + 1;
vector<Point> points;
for( i = 0; i < count; i++ )
{
Point pt;
pt.x = rng.uniform(img.cols/4, img.cols*3/4);
pt.y = rng.uniform(img.rows/4, img.rows*3/4);
points.push_back(pt);
}
// Jeff --> hull is the indice of corner points
vector<int> hull;
convexHull(Mat(points), hull, true);
/******************************************************************************/
// Jeff --> draw the effect.
img = Scalar::all(0);
for( i = 0; i < count; i++ )
circle(img, points[i], 3, Scalar(0, 0, 255), FILLED, LINE_AA);
int hullcount = (int)hull.size();
cout << hullcount << endl;
Point pt0 = points[hull[hullcount-1]];
for( i = 0; i < hullcount; i++ )
{
// Jeff --> extract corners.
Point pt = points[hull[i]];
line(img, pt0, pt, Scalar(0, 255, 0), 1,LINE_AA);
pt0 = pt;
}
imshow("hull", img);
key = (char)waitKey();
if( key == 27 || key == ‘q‘ || key == ‘Q‘ ) // ‘ESC‘
break;
}
return 0;
}
进一步参见:OpenCV成长之路:直线、轮廓的提取与描述
[OpenCV] Samples 05: convexhull
标签:str ios function 应用 bre mon std 入参 凸包
原文地址:http://www.cnblogs.com/jesse123/p/6105031.html