标签:grid bsp 图像 ons 实现 lock 算法 滤波器 均值
点云滤波是点云处理的基本步骤,也是进行 high level 三维图像处理之前必须要进行的预处理。其作用类似于信号处理中的滤波,但实现手段却和信号处理不一样。我认为原因有以下几个方面:
综上所述,点云滤波只在抽象意义上与信号,图像滤波类似。因为滤波的功能都是突出需要的信息。
PCL常规滤波手段均进行了很好的封装。对点云的滤波通过调用各个滤波器对象来完成。主要的滤波器有直通滤波器,体素格滤波器,统计滤波器,半径滤波器 等。不同特性的滤波器构成了较为完整的点云前处理族,并组合使用完成任务。实际上,滤波手段的选择和采集方式是密不可分的。
实际上点云滤波的手段和传统的信号滤波与图像滤波在自动化程度,滤波效果上还有很大的差距。学者大多关注图像识别与配准算法在点云处理方面的移植,而对滤波算法关注较少。其实点云前处理对测量精度与识别速度都有很大影响。
点云库中已经包含了上述所有滤波算法。PCL滤波算法的实现是通过滤波器类来完成的,需要实现滤波功能时则新建一个滤波器对象并设置参数。从而保证可以针对不同的滤波任务,使用不同参数的滤波器对点云进行处理。
直通滤波器:
// Create the filtering object pcl::PassThrough<pcl::PointXYZ> pass; pass.setInputCloud (cloud); pass.setFilterFieldName ("z"); pass.setFilterLimits (0.0, 1.0); //pass.setFilterLimitsNegative (true); pass.filter (*cloud_filtered);
体素滤波器:
// Create the filtering object pcl::VoxelGrid<pcl::PCLPointCloud2> sor; sor.setInputCloud (cloud); sor.setLeafSize (0.01f, 0.01f, 0.01f); sor.filter (*cloud_filtered);
统计滤波器:
// Create the filtering object pcl::StatisticalOutlierRemoval<pcl::PointXYZ> sor; sor.setInputCloud (cloud); sor.setMeanK (50); sor.setStddevMulThresh (1.0); sor.filter (*cloud_filtered);
半径滤波器:
如图1所示,有助于形象化理解RadiusOutlierRemoval的作用,在点云数据中,用户指定每个的点一定范围内周围至少要有足够多的近邻。例如,如果指定至少要有1个邻居,只有黄色的点会被删除,如果指定至少要有2个邻居,黄色和绿色的点都将被删除。
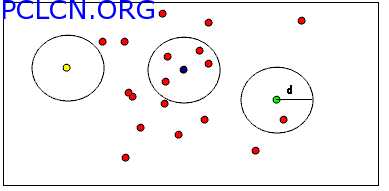 图1
图1
// build the filter pcl::RadiusOutlierRemoval<pcl::PointXYZ> outrem; outrem.setInputCloud(cloud); outrem.setRadiusSearch(0.8); outrem.setMinNeighborsInRadius (2); // apply filter outrem.filter (*cloud_filtered);
显然,不同的滤波器在滤波过程中,总是先创建一个对象,再设置对象参数,最后调用滤波函数对点云进行处理(点云为智能指针指向的一块区域)
http://www.cnblogs.com/ironstark/p/4991232.html
http://www.pclcn.org/study/shownews.php?lang=cn&id=73
标签:grid bsp 图像 ons 实现 lock 算法 滤波器 均值
原文地址:http://www.cnblogs.com/zhaobinyouth/p/6196358.html