标签:str 指令 eve 打印 list conf http ref size
详细参照 http://wiki.ros.org/ROS/Tutorials/InstallingandConfiguringROSEnvironment
1.
mkdir -p ~/catkin_ws/src
解析:
在 /home/你的用户名目录/ 下创建一个ROS工作空间,即文件夹catkin_ws,
然后在工作空间 catkin_ws 下创建一个文件夹 src
你也可以将工作空间 catkin_ws 起成其他名字,例如:mkdir -p ~/tutorial/src ,那么下面的所有命令中的catkin_ws都要对应换成 tutorial(命令 ls 的功能即查看当前所在目录里有哪些文件)
2.
cd ~/catkin_ws/src
解析:
打开工作空间catkin_ws下的文件夹src(命令 pwd 的功能即查看当前所在目录)
3.
catkin_init_workspace
解析:
执行完该命令后,src目录下会多出一个 CMakeLists.txt 文件。
4.
cd ~/catkin_ws/
解析:
返回到上层目录

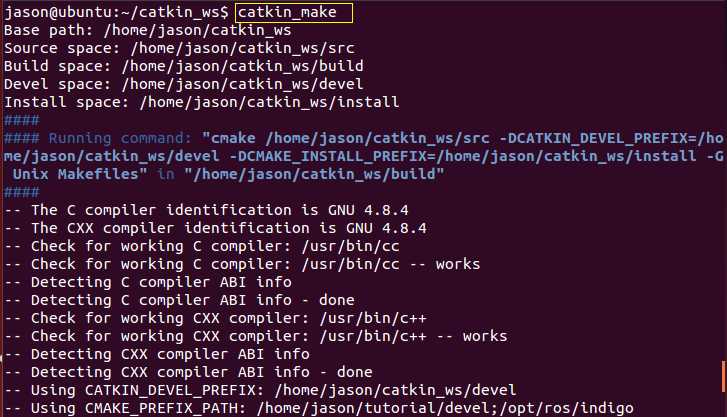
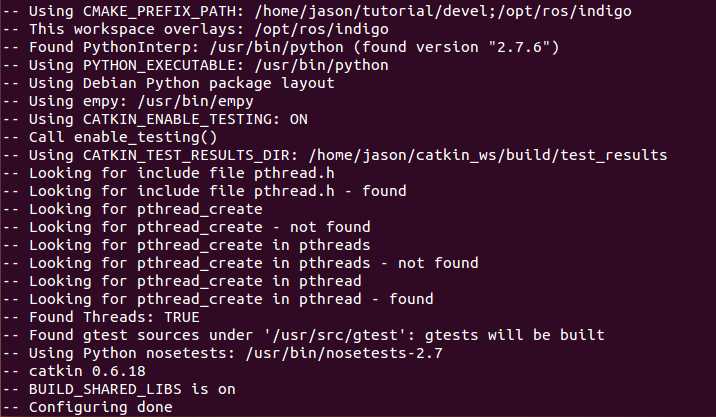
5.
catkin_make
解析:
执行完该命令后,发现工作空间catkin_ws中有三个目录: build devel src
其中,src是我们创建工作空间时创建的目录,另外两个是执行完 catkin_make 后生成的。

6.
source devel/setup.bash
解析:
如果新开了一个终端命令行,在使用该工作空间前,必须先进入该工作空间执行该条指令一遍,设置好工作环境。
7.
echo $ROS_PACKAGE_PATH

如果打印出以下信息,说明你的工作环境设置好了:
/home/你的用户名/你的工作空间名/src:/opt/ros/indigo/share:/opt/ros/indigo/stacks
创建一个ROS Workspace 的方法总结:
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
cd ~/catkin_ws/
catkin_mak
source devel/setup.bash
标签:str 指令 eve 打印 list conf http ref size
原文地址:http://www.cnblogs.com/huangjianxin/p/6347416.html