标签:global ati 表示 hid 方式 size overflow atom 三维
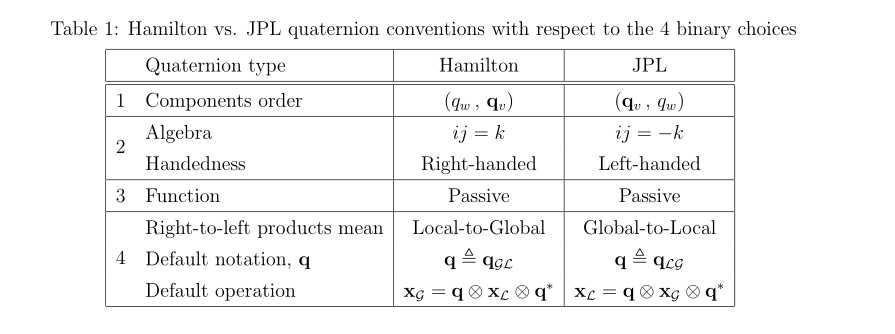
一种是假设坐标轴frame不变(active),向量在旋转,这种类似于相机不动,相机里观察的目标在动,或者说整个过程都是假定在一个坐标系下的。
一种是假设向量不变(passive),坐标轴在变,类似于相机的视角在变,目标不动,这个和很多SLAM中的表述方式一致,因为SLAM中是假设路标是静止的。如barfoot书中,一个向量r可以由由不同坐标系下的坐标表示,即passive。Hamliton和JPL都是使用的passive的方式。

两种方式其实也是相对运动的关系
可以证明,Hamilton和JPL的四元数表示在数值上是相等的。
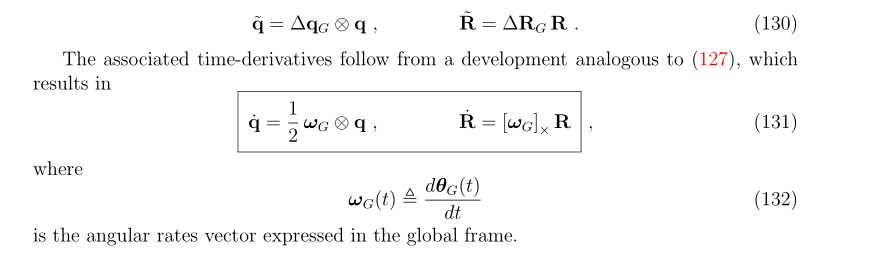
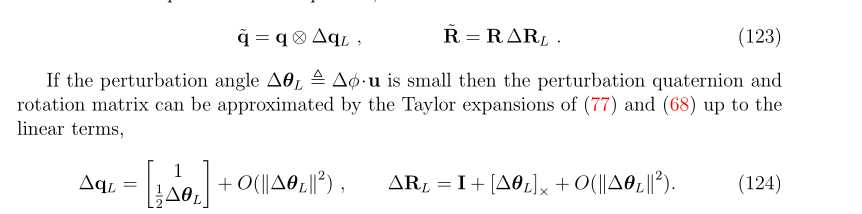
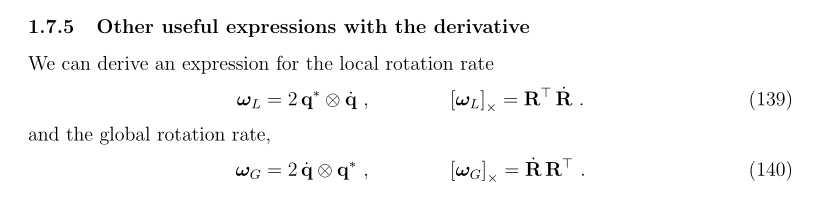
局部扰动(local perturbation)是右扰动形式;
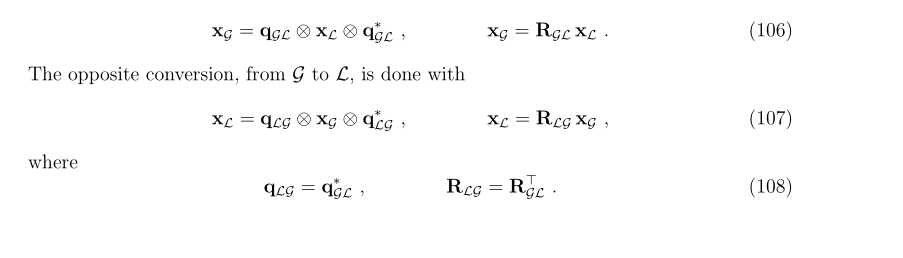
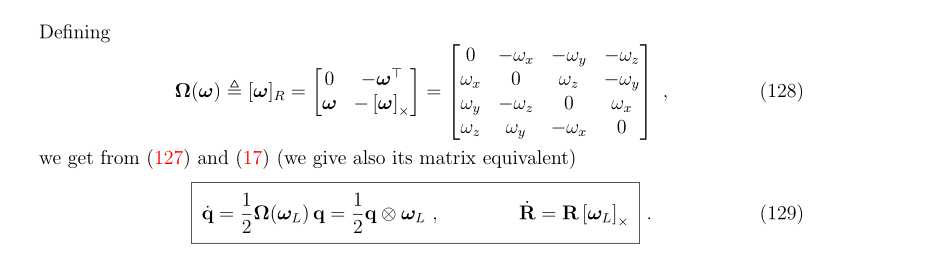
local to global的形式下,局部扰动项表示为(下标第一个是旧坐标系G,第二个是新坐标系L)
global 扰动是左扰动,证明和局部扰动是相似的:
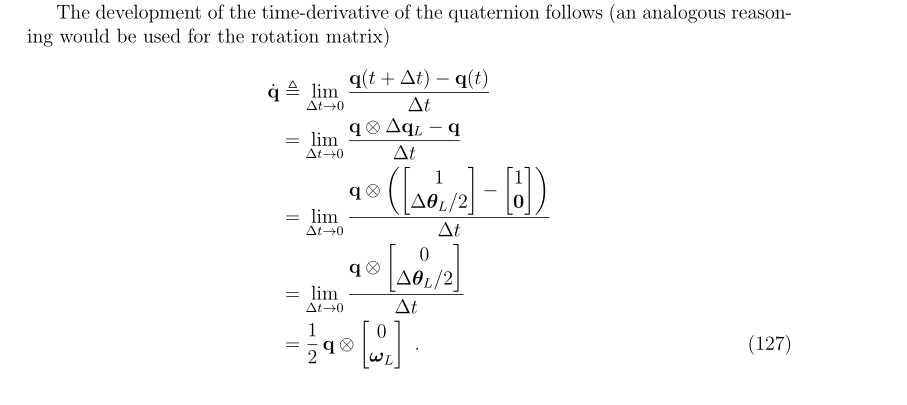
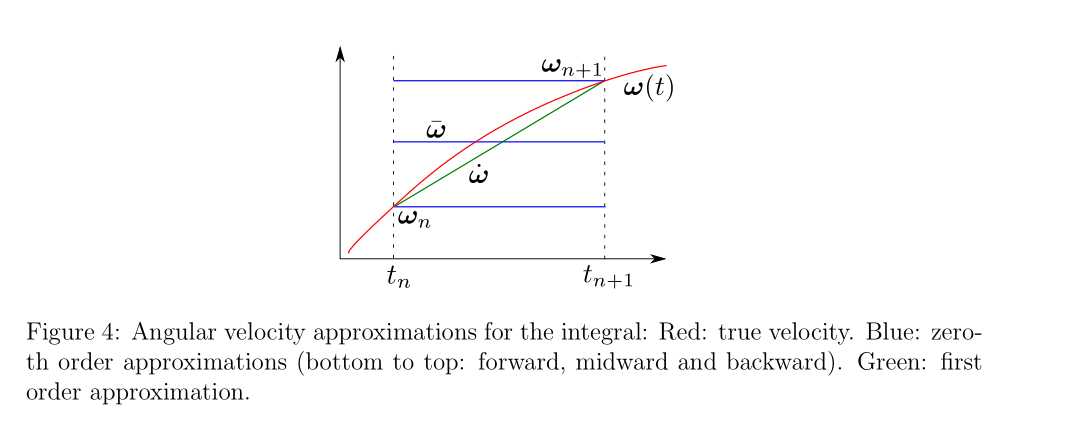
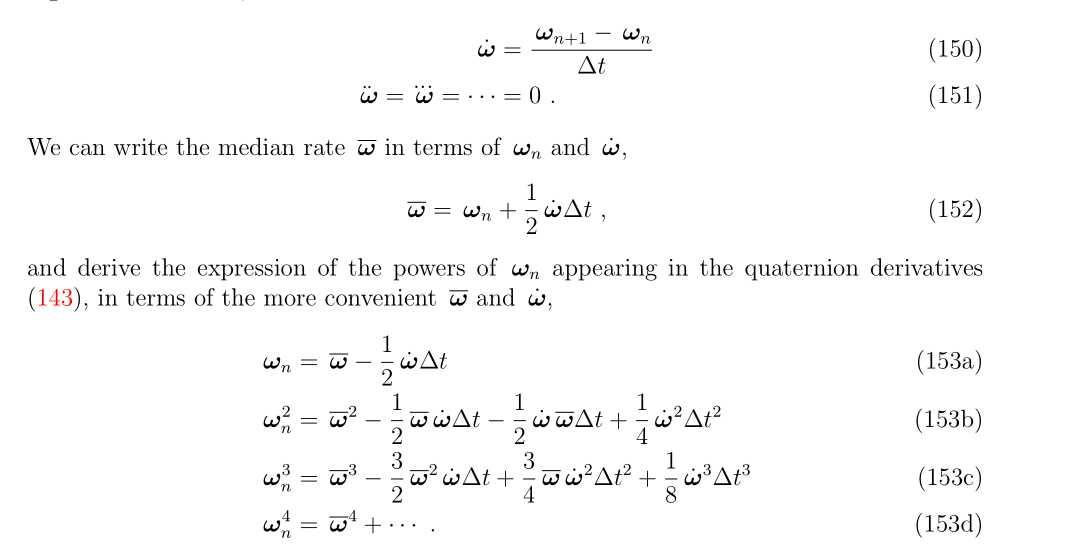
一阶积分是假设的二阶微分为0,一微分是常数,利用插值方法得到:
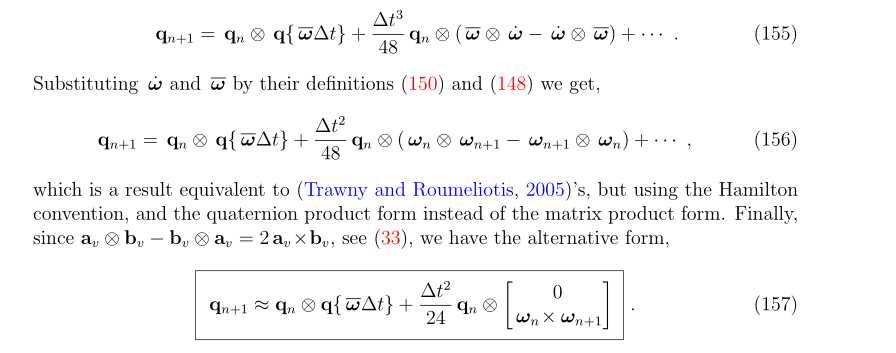
代入2.1中的泰勒展开式,并利用叉乘性质简化:
标签:global ati 表示 hid 方式 size overflow atom 三维
原文地址:http://www.cnblogs.com/youzx/p/6387740.html