标签:变量 .com 线性 alt 大小 响应 改变 运行 控制器
《控制系统设计指南》第一章和第二章读书笔记(一)
第一章 控制理论简介
1.2控制系统
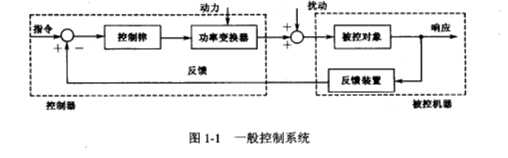
1.2.1控制器
控制器由控制律与功率变换器协同工作,控制律只生成信息,必须施加能量才能控制被控对象。
1.2.2被控机器
被控机器由被控对象与反馈装置组成。
第二章 频率域研究法
2.1拉普拉斯变换
2.2传递函数
一个频率域传递函数只限于描述线性、时不变元件。在现实中并不存在完全满足这几个限制的系统,为了解决这个问题,可以设计补偿环节使得系统非常接近线性时不变系统。
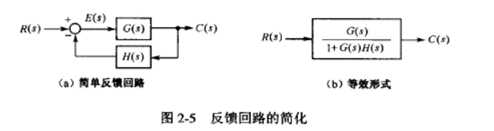
2.4框图
反馈回路的简化:

Mason信号流程图:
2.5相位与增益
增益通常用dB表示:
相位:
2.6性能测量
指令响应:用来量度一个系统如何迅速跟随指令信号。
系统的增益越大,响应越快。
稳定性:描述一个系统如何可预见地跟随一个指令信号。
超调量:响应的峰值对指令信号改变量的比值。在时间域中用超调量的大小来衡量系统的稳定性。
问题:
1 时不变性到底指的是什么性质?
2 Mason化简传递函数的理论依据是什么。
3为什么在正常运行中,很少有系统接收到阶跃信号。
4 测量系统响应是,为使结果有异议,指令信号的幅值必须足够小,以使得在响应测试过程中保持线性保持在线性范围内运行。(为什么幅值足够小,系统就保持在线性范围内运行?)
标签:变量 .com 线性 alt 大小 响应 改变 运行 控制器
原文地址:http://www.cnblogs.com/Qiangcm/p/6444088.html