标签:记录 nbsp 检测 cat client play 扫描 雷达 文件
一、建立工作空间、编译包
mkdir -p ~/catkin_rplidar/src #创建目录 cd ~/catkin_rplidar/src #打开目录 #下载rplidar_ros数据包,进行移动 git clone https://github.com/robopeak/rplidar_ros mv ~/rplidar_ros ~/catkin_rplidar/src #返回根目录,进行编译 cd ~/catkin_rplidar catkin_make #添加环境变量 source devel/setup.bash
二、创建激光雷达(Rplidar)的串口别名
1、连接usb数据线到rplidar,进行usb端口的检测
lsusb
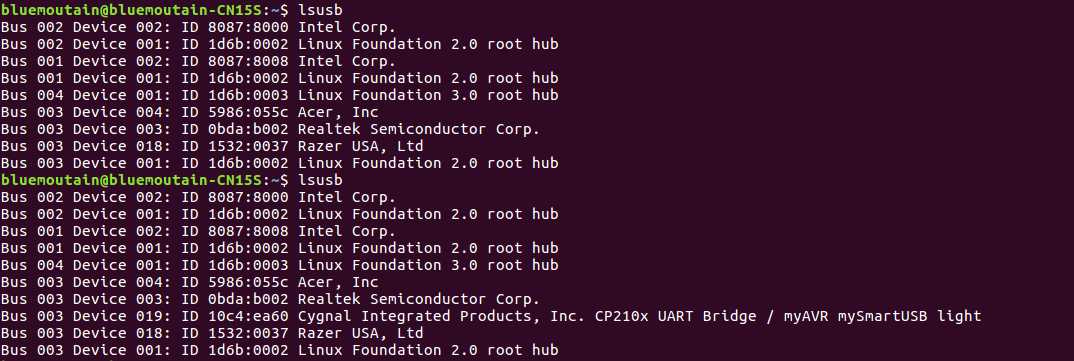
记录下来,CP210X UART的ID,写入udev,进行设备管理。
2、创建udev规则
vim /etc/udev/rules.d/rapliar.rules
贴下面配置代码
KERNEL=="ttyUSB*", ATTRS{idVendor}=="10c4", ATTRS{idProduct}=="ea60", MODE:="0666", GROUP:="dialout", SYMLINK+="rplidar"
3、增加当前用户对串口的默认访问权限:
sudo usermod -a -G dialout 用户名
4、使UDEV配置生效:(使串口的默认访问权限生效,需要重启机器)
sudo service udev reload sudo service udev restart
三、使用ROS包进行测试
1、检测串口
ls -l /dev |grep ttyUSB
![]()
2、赋予权限
sudo chmod 666 /dev/ttyUSB0
3、在编译的ROS包中运行launch文件
roslaunch rplidar_ros view_rplidar.launch
可以在rviz看到雷达扫描距离信息
4、在shell中观察检测数据
roslaunch rplidar_ros rplidar.launch
rosrun rplidar_ros rplidarNodeClient
Rplidar学习(三)—— ROS下进行rplidar调试
标签:记录 nbsp 检测 cat client play 扫描 雷达 文件
原文地址:http://www.cnblogs.com/BlueMountain-HaggenDazs/p/6523330.html