标签:status 全局 代码 理解 imp 设备 handle 函数 set
蓝牙通信中,我们就是需要对各个服务中的特征值进行交流,现在尝试自定义一个服务。
这是服务的主体文件。
其里面大致无非是定义特征值,创建读写值的函数,注册函数,增添服务函数,以及包装一些回调函数。
具体如下。
(1)所有定义的变量其实都是和特征值相关的,具体详见上篇文章:http://www.cnblogs.com/asam/p/6535374.html
(2)创建函数
需要创建的函数如下:
全局函数:
extern bStatus_t TEMProfile_GetParameter( uint8 param, void *value); extern bStatus_t TEMProfile_SetParameter( uint8 param, uint8 len, void *value); extern bStatus_t TEMProfile_RegisterAppCBs( TEMProfileCBs_t *appCallback); extern bStatus_t TEMProfile_AddService( uint32 services );
本地函数:
static uint8 TEMProfile_ReadAttrCB(uint16 connHandle, gattAttribute_t *pAttr,uint8 *pValue, uint8 *pLen, uint16 offset, uint8 maxLen ); static bStatus_t TEMProfile_WriteAttrCB( uint16 connHandle, gattAttribute_t *pAttr, uint8 *pValue, uint8 len, uint16 offset ); static void TEMProfile_HandleConnStatusCB( uint16 connHandle, uint8 changeType );
==小注解===============================================================================
其中读写的四个函数在此前已经见过。
这两个回调函数 TEMProfile_ReadAttrCB(),TEMProfile_WriteAttrCB(),是封装在一起的。
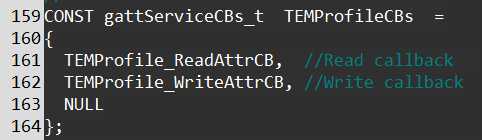
跟踪下去,发现其是在ADDService函数中被调用,这个函数是一开始任务初始化时,调用的。
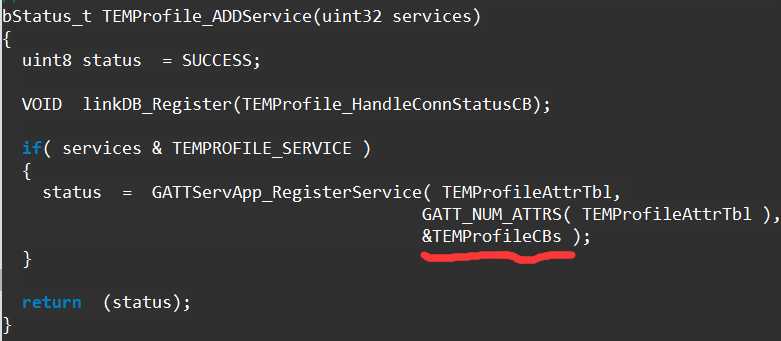
故猜想,大概是这个回调函数的指针在初始化增添服务的时候,已经被记录,当通信时其他设备请求读写这个服务时才调用到两个函数。
======================================================================================
除了四个认识的,还有两个服务初始化用的函数
bStatus_t TEMProfile_RegisterAppCBs( TEMProfileCBs_t *appCallback);
bStatus_t TEMProfile_AddService( uint32 services );
这两个在任务初始化时,被调用。
前者调用的是在应用层写的。具体后面再讲。
3.应用层的相关代码
(1)添加头文件 #include "XXXprofile.h"
(2)服务初始化
在应用层simpleBLEPeripheral.c中的SimpleBLEPeripheral_Init()函数中,增添
1 //Templete_Service 2 TEMProfile_ADDService(GATT_ALL_SERVICES); 3 // Set the TEMProfile Characteristic Values 4 5 uint8 TEMProfile_Char1Vaule=1; 6 uint8 TEMProfile_Char2Value[TEMPROFILE_CHAR2_LEN]="2017.03.11\0"; 7 TEMProfile_SetParameter( TEMPROFILE_CHAR1, sizeof(uint8), &TEMProfile_Char1Vaule ); 8 TEMProfile_SetParameter( TEMPROFILE_CHAR2, TEMPROFILE_CHAR2_LEN, TEMProfile_Char2Value ); 9 10 //register 11 VOID TEMProfile_RegisterAppCBs(&simpleBLEPeripheral_TEMProfileCBs);
这时就用到了上面说的两个函数。
TEMProfile_RegisterAppCBs是注册回调函数。simpleBLEPeripheral_TEMProfileCBs()在WriteAtrr中被调用。被调用的那个函数的含义是当特征值变化时则做出相应动作。但具体依然不理解。
(3)定义回调函数
1 static void simpleProfileChangeCB( uint8 paramID ) 2 { 3 uint8 newValue; 4 5 switch( paramID ) 6 { 7 case SIMPLEPROFILE_CHAR1: 8 SimpleProfile_GetParameter( SIMPLEPROFILE_CHAR1, &newValue ); 9 10 #if (defined HAL_LCD) && (HAL_LCD == TRUE) 11 HalLcdWriteStringValue( "Char 1:", (uint16)(newValue), 10, HAL_LCD_LINE_3 ); 12 #endif // (defined HAL_LCD) && (HAL_LCD == TRUE) 13 14 break; 15 16 case SIMPLEPROFILE_CHAR3: 17 SimpleProfile_GetParameter( SIMPLEPROFILE_CHAR3, &newValue ); 18 19 #if (defined HAL_LCD) && (HAL_LCD == TRUE) 20 HalLcdWriteStringValue( "Char 3:", (uint16)(newValue), 10, HAL_LCD_LINE_3 ); 21 #endif // (defined HAL_LCD) && (HAL_LCD == TRUE) 22 23 break; 24 25 default: 26 // should not reach here! 27 break; 28 } 29 }
(4)包装一下回调函数
1 static TEMProfileCBs_t simpleBLEPeripheral_TEMProfileCBs = 2 { 3 TEMProfileChangeCB 4 };
至此,完成一个服务的建立
标签:status 全局 代码 理解 imp 设备 handle 函数 set
原文地址:http://www.cnblogs.com/asam/p/6535641.html