标签:reader python animation track 模型 tin stride form server
让机器人行走最简单的方法是先得到一组步态曲线,即腿部每个关节随时间运动的角度值。可以在ADAMS或3D Max、Blender等软件中建立好机构/骨骼模型,设计出脚踝和髋关节的运动曲线,然后进行逆运动学解算,测量每个关节在运动过程中的转角,最后将得到的曲线导出。拿到曲线数据后我们就可以用单片机读取,然后发送给机器人的舵机去执行运行。这种方法的缺点是机器人只能按照固定的步态行走,不够灵活,比如抬脚高度、步长等参数都是定死的,如果需要修改还得再使用别的软件导出新的步态数据。
最简单的腿部结构如下图所示,在髋关节、膝关节和踝关节各有一个转动自由度,可以通过三角形余弦定理求得机构的运动学逆解。这种机器人只能在矢状面上直线前进,不能转弯。对行走过程进行一定的简化和假设:
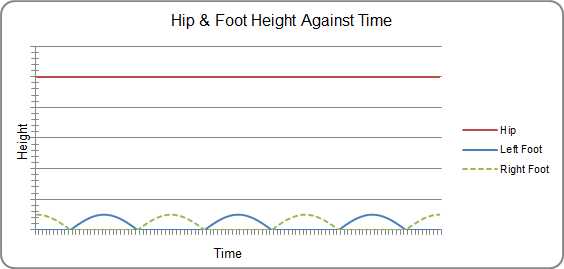
1. 髋关节始终保持恒定的高度(实际上会有微小的波动)
2. 机器人脚面始终平行于地面
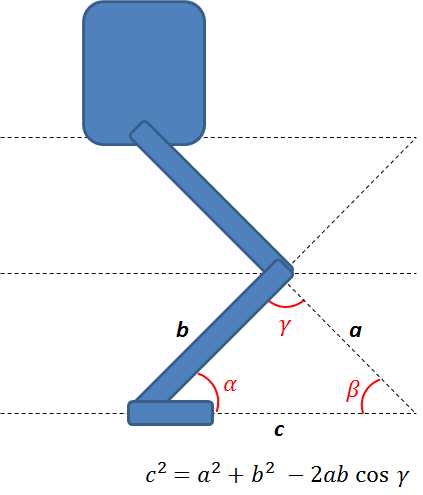
为了确定每个关节的角度,需要设计行走过程中踝关节点的运动轨迹。这里采用简单的正弦曲线作为其轨迹(也可以采用样条曲线、Bézier 曲线等),正弦曲线的幅值对应抬脚最大高度。
在Python中实现导入双腿模型文件,生成指定的步态数据后让其循环运动,就可以模拟机器人行走。代码如下(很糙...只是实现了基本功能,细节还有待完善)

#!/usr/bin/env python import vtk import math from vtk.util.colors import * import numpy as np filenames = ["link-1.stl","link-2.stl","link-3.stl","link-4.stl","link-5.stl","link-6.stl"] renWin = vtk.vtkRenderWindow() actor = list() # the list of links joint1 = vtk.vtkAssembly() joint2 = vtk.vtkAssembly() joint3 = vtk.vtkAssembly() joint4 = vtk.vtkAssembly() joint5 = vtk.vtkAssembly() joint6 = vtk.vtkAssembly() ThighLength = 100.0 ShankLength = 100.0 HipHeight = 180.0 FootLift = 10 StrideLength = 60 Subdivision = 20 leg_joint = np.zeros(3, dtype=np.float) patterns = np.zeros((2*Subdivision ,6), dtype=np.float) _p = 0 def Rad2Deg(rad): return rad * 180.0 / math.pi def FootHeight(x): return (HipHeight - FootLift * math.cos(abs(x * math.pi / StrideLength))) def LegIK(x, y): global leg_joint dist = math.sqrt(x**2 + y**2) leg_joint[0] = math.acos(dist / (2 * ShankLength)) + math.atan2(x, y) leg_joint[1] = math.pi - math.acos((ThighLength**2 + ShankLength**2 - dist**2) / (2 * ThighLength* ShankLength)) leg_joint[2] = leg_joint[1] - leg_joint[0] def GenerateGait(): global leg_joint global patterns # Move left leg forward. for i in range(Subdivision): x = (i - Subdivision/2) * (StrideLength / Subdivision) y = FootHeight(x) LegIK(x, y) patterns[i, :3] = Rad2Deg(leg_joint) # Move left leg backward. for i in range(Subdivision): x = (Subdivision/2 - i) * (StrideLength / Subdivision) y = HipHeight LegIK(x, y) patterns[i+Subdivision, :3] = Rad2Deg(leg_joint) # Build right leg from phase shift clone of left. for i in range(2*Subdivision): patterns[i, 3:] = -patterns[(i + Subdivision) % (2*Subdivision), :3] # Customize vtkInteractorStyleTrackballCamera class MyInteractor(vtk.vtkInteractorStyleTrackballCamera): def __init__(self,parent=None): self.AddObserver("CharEvent",self.OnCharEvent) self.AddObserver("KeyPressEvent",self.OnKeyPressEvent) def OnCharEvent(self,obj,event): pass def OnKeyPressEvent(self,obj,event): global angle global _p # Get the compound key strokes for the event key = self.GetInteractor().GetKeySym() GenerateGait() if(key == "Return"): # start animation joint1.SetPosition(0, 0, HipHeight-ThighLength-ShankLength) joint4.SetPosition(0, 0, HipHeight-ThighLength-ShankLength) if (_p == 2*Subdivision): _p = 0 joint1.SetOrientation(0, -patterns[_p][0], 0) joint2.SetOrientation(0, patterns[_p][1], 0) joint3.SetOrientation(0, -patterns[_p][2], 0) joint4.SetOrientation(0, patterns[_p][3], 0) joint5.SetOrientation(0, -patterns[_p][4], 0) joint6.SetOrientation(0, patterns[_p][5], 0) _p = _p + 1; renWin.Render() return def CreateCoordinates(): # create coordinate axes in the render window axes = vtk.vtkAxesActor() axes.SetTotalLength(40, 40, 40) # Set the total length of the axes in 3 dimensions # Set the type of the shaft to a cylinder:0, line:1, or user defined geometry. axes.SetShaftType(0) transform = vtk.vtkTransform() transform.Translate(0.0, 0.0, 200.0) axes.SetUserTransform(transform) axes.SetCylinderRadius(0.02) axes.GetXAxisCaptionActor2D().SetWidth(0.03) axes.GetYAxisCaptionActor2D().SetWidth(0.03) axes.GetZAxisCaptionActor2D().SetWidth(0.03) return axes def CreateGround(): # create plane source plane = vtk.vtkPlaneSource() plane.SetXResolution(20) plane.SetYResolution(20) plane.SetCenter(0,0,0) plane.SetNormal(0,0,1) # mapper mapper = vtk.vtkPolyDataMapper() mapper.SetInputConnection(plane.GetOutputPort()) # actor actor = vtk.vtkActor() actor.SetMapper(mapper) actor.GetProperty().SetRepresentationToWireframe() actor.GetProperty().SetColor(light_grey) transform = vtk.vtkTransform() transform.Scale(400,400,1) actor.SetUserTransform(transform) return actor def LoadSTL(filename): reader = vtk.vtkSTLReader() reader.SetFileName(filename) mapper = vtk.vtkPolyDataMapper() # maps polygonal data to graphics primitives mapper.SetInputConnection(reader.GetOutputPort()) actor = vtk.vtkLODActor() actor.SetMapper(mapper) return actor # represents an entity in a rendered scene def CreateScene(): # Create a rendering window and renderer ren = vtk.vtkRenderer() renWin.AddRenderer(ren) # Create a renderwindowinteractor iren = vtk.vtkRenderWindowInteractor() iren.SetRenderWindow(renWin) style = MyInteractor() style.SetDefaultRenderer(ren) iren.SetInteractorStyle(style) for id, file in enumerate(filenames): actor.append(LoadSTL(file)) r = vtk.vtkMath.Random(.4, 1.0) g = vtk.vtkMath.Random(.4, 1.0) b = vtk.vtkMath.Random(.4, 1.0) actor[id].GetProperty().SetDiffuseColor(r, g, b) actor[id].GetProperty().SetDiffuse(.8) actor[id].GetProperty().SetSpecular(.5) actor[id].GetProperty().SetSpecularColor(1.0,1.0,1.0) actor[id].GetProperty().SetSpecularPower(30.0) joint1.AddPart(actor[0]) joint1.AddPart(joint2) joint2.AddPart(actor[1]) joint2.AddPart(joint3) joint3.AddPart(actor[2]) joint4.AddPart(actor[3]) joint4.AddPart(joint5) joint5.AddPart(actor[4]) joint5.AddPart(joint6) joint6.AddPart(actor[5]) joint1.SetOrigin(0, 0, 200) joint4.SetOrigin(0, 0, 200) joint2.SetOrigin(0, 0, 100) joint5.SetOrigin(0, 0, 100) ren.AddActor(joint1) ren.AddActor(joint4) # Add coordinates axes = CreateCoordinates() ren.AddActor(axes) # Add ground ground = CreateGround() ren.AddActor(ground) # Set background color ren.SetBackground(.1, .1, .1) # Set window size renWin.SetSize(600, 600) # Enable user interface interactor iren.Initialize() iren.Start() if __name__ == "__main__": CreateScene()
按住回车键,一帧一帧播放动画。最后的效果是这样的:
参考:
https://github.com/Rhoban/IKWalk
Using Inverse Kinematics to Develop a Biped Robot Walking Gait C#
8 DOF Biped Robot using Dynamixel AX-12A Servos and Arduino
标签:reader python animation track 模型 tin stride form server
原文地址:http://www.cnblogs.com/21207-iHome/p/6052159.html
