标签:images space class convert pac 图像 简介 nbsp color
一、四个坐标系简介和相互转换
相机模型为以后一切标定算法的关键,只有透彻的理解了,对以后的标定算法才有更好的理解。
首先要理解相机模型中的四个平面坐标系的关系:像素平面坐标系(u,v)、像平面坐标系(图像物理坐标系(x,y))、相机坐标系(xc,yc,zc)和世界坐标系(Xw,Yw,Zw)。
我们通过假设一些参数,使上面四个坐标系之间的坐标联系起来,这样我们就可以把拍摄的图片上的一个点坐标反推导出世界坐标系中的那个点坐标,这样就达到了三维重建的目的。而那些我们假设的参数,就是我们要标定的内外参数。
1、像素坐标与像平面坐标系之间的关系
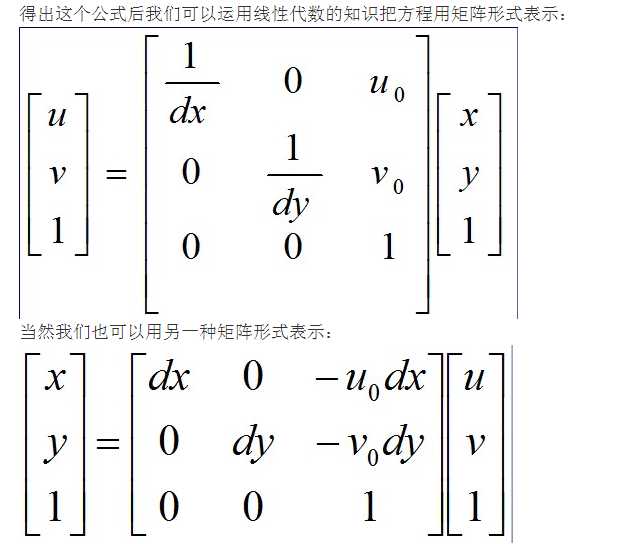
确定他们的关系之前,我们可以假设每一个像素在u轴和v轴方向上的物理尺寸为dx和dy。仔细看下他们的模型可以推出以下公式。
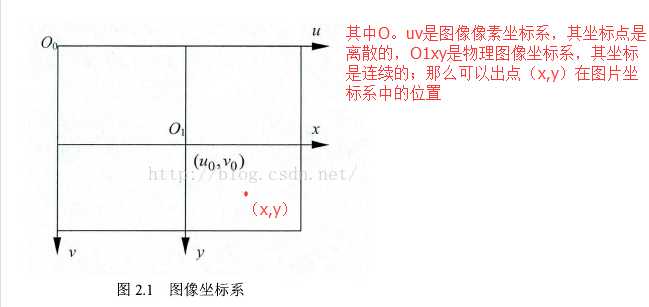

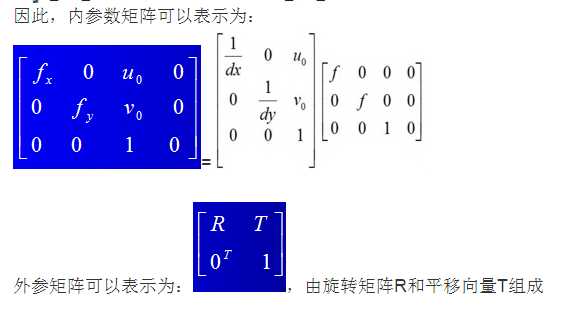
解释:1、dx,dy,u0,v0其实都是我们假设出来的参数,dxdy表示感光芯片上像素的实际大小,是连接像素坐标系和真实尺寸坐标系的,u0,v0是图像平面中心,最终是要我们求的内外参数。
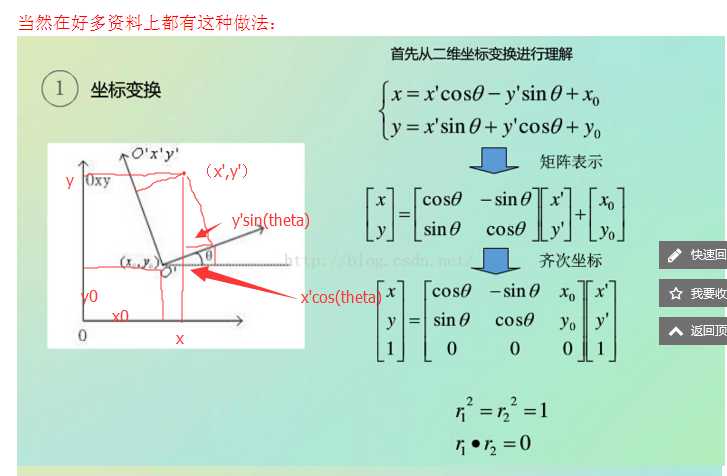
2、相机坐标系与世界坐标系之间的关系
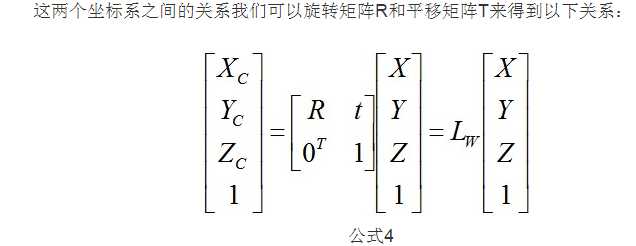
解释:1、 在这个公式中,R为3*3矩阵,T为3*1,0为(0,0,0),简化用Lw表示后为4*4矩阵。
3、成像投影关系(相机坐标系与像平面坐标系)
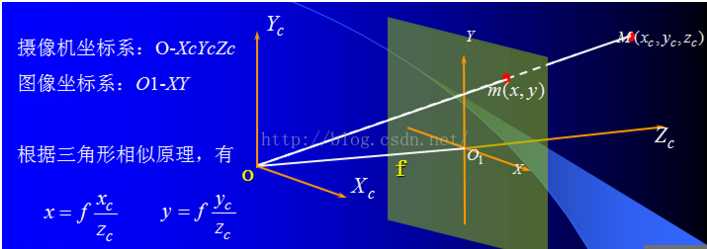
在相机模型中我们可以得到以下公式:
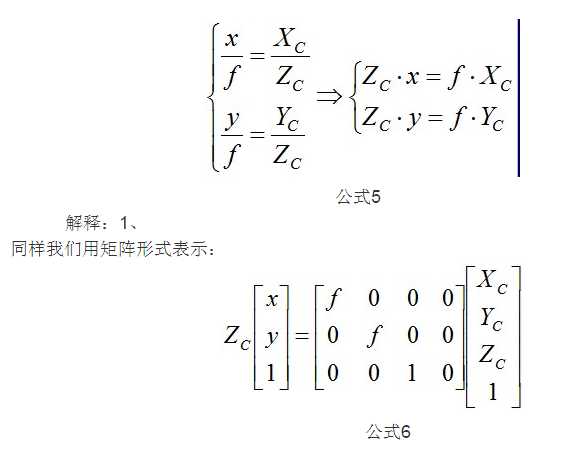
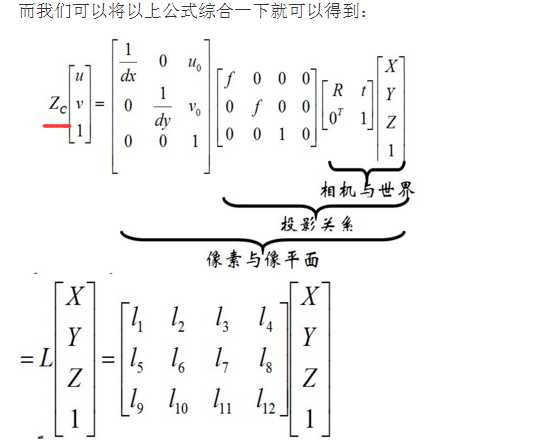
4、得到公式
标签:images space class convert pac 图像 简介 nbsp color
原文地址:http://www.cnblogs.com/gary-guo/p/6553155.html