标签:9.png gen 版本 log 方案 src ue4 设置 ogr
我用的UE版本是4.14.1 系统:win10 64
前不久给样板房里面做了一个扫地机器人,导航设置让我头大了很久,度娘也没有用,最后在谷哥上有所感悟,现在给出本人的设置过程和解决方案。
一开始拖了个NavMeshBoundsVolume到样板房里面,按键盘 p 查看可导航区域一看傻眼了,如下图

一看就傻眼了,绿色区域这么少几乎不可导航,想到《Unreal.Engine.4.AI.Programming》上好像有navmesh相关设置介绍,去看了也只是简单的
介绍,自己也设置了一下参数

选择红色方框里面的 Recast 设置参数如下
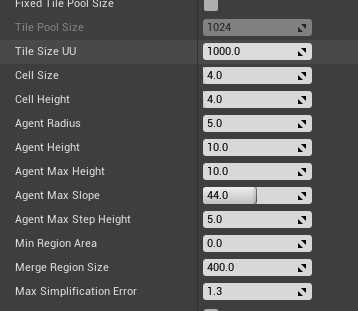
可导航区域就变大了,但是啊开心得还太早,因为还是不能导航,

设置机器人如图,主要是设置碰撞体的范围

都到了这一步了可能很多人都觉得大功告成,但是呵呵了,在蓝图里面使用MoveToLocationOrActor方法就是没反应
这里就是让人蛋疼的地方,也不知道什么原因。因为还少了最后一步。

在这里面还要添加一个Agents
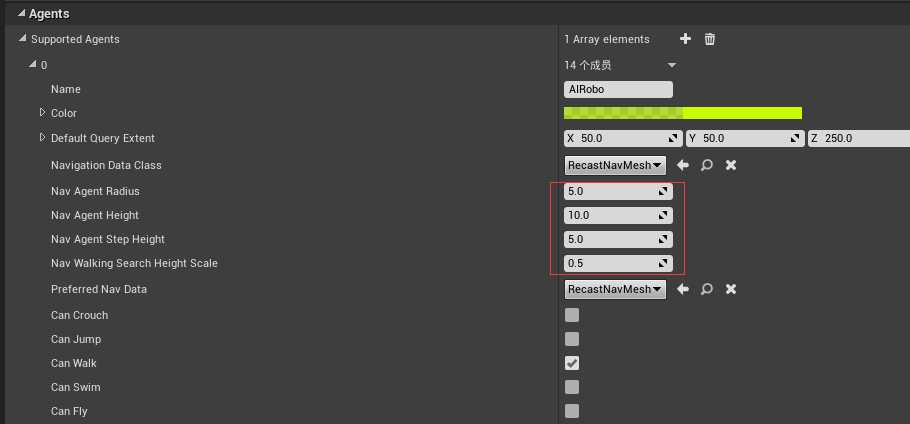
现在就真的大功告成了,在房间任何绿色区域丢个垃圾,少地机器人就可以去把它吃掉了。
By 头大
标签:9.png gen 版本 log 方案 src ue4 设置 ogr
原文地址:http://www.cnblogs.com/abelmou/p/6574936.html
{kind=link}