标签:之间 efi ota uniq 旋转 几何 cstring 感受 img
今天学习一下旋(xuan1)转(zhuan3)卡(qia3)壳(qiao4)
1.凸包
2.对踵点
定理:最远点对必然属于对踵点对集合
对踵点定义:
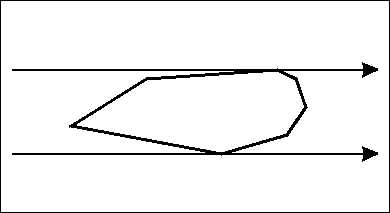
如果过凸包上的两个点可以画一对平行直线,使凸包上的所有点都
夹在两条平行线之间或落在平行线上,那么这两个点叫做一对对踵点。
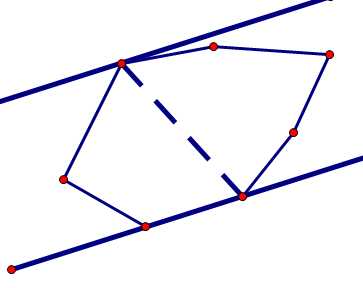
具体有两种情况:
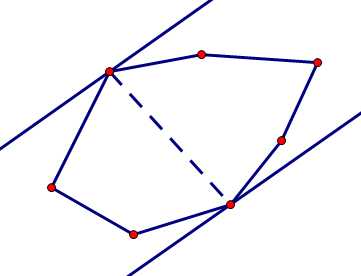
1.两个平行线正好卡着两个点
2.两个平行线分别卡着一条边和一个点
Rotating calipers Algorithm 是基于情况2的
考虑到,固定一条边,凸包上的点到线的距离构成一个单峰函数,
所以,有“单调性”(姑且叫做单调性)
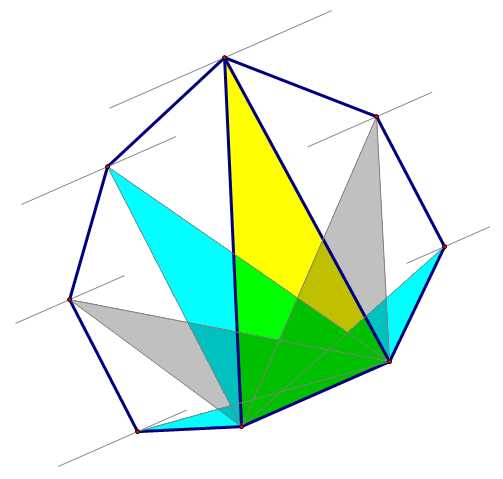
直观的感受一下
post the Rujia Liu ‘s words :
/* 当Area(p[u], p[u+1], p[v+1]) <= Area(p[u], p[u+1], p[v])时停止旋转 即Cross(p[u+1]-p[u], p[v+1]-p[u]) - Cross(p[u+1]-p[u], p[v]-p[u]) <= 0 根据Cross(A,B) - Cross(A,C) = Cross(A,B-C) 化简得Cross(p[u+1]-p[u], p[v+1]-p[v]) <= 0 */
旋转code

1 db RC(D*R,int n){//Rotating calipers 2 R[0]=R[n];// avoid to mod 3 db ans=0.0; 4 for(int u=0,v=1;u<n;u++){ 5 while(Cross(R[u+1]-R[u],R[v+1]-R[v])>0)v=(v+1)%n; 6 ans=max(ans,Dis2(R[u],R[v])); 7 ans=max(ans,Dis2(R[u+1],R[v+1])); 8 } 9 return ans; 10 }
一个小技巧,手写unique(其实是不会用STL,PS:不去重可以过)
1 bl operator==(D A,D B){return (fabs(A.x-B.x)<eps && fabs(A.y-B.y)<eps);} 2 3 void Unique(D*R,int&n){ 4 bl*In=new bl[n]; 5 for(int i=1;i<=n;i++)if(R[i+1]==R[i])In[i+1]=1;else In[i]=0; 6 int cnt=0; 7 for(int i=1;i<=n;i++)if(!In[i])R[++cnt]=R[i]; 8 n=cnt; 9 }
ACcode
1 #include <algorithm> 2 #include <iostream> 3 #include <cstring> 4 #include <cstdlib> 5 #include <cstdio> 6 #include <vector> 7 #include <cmath> 8 #include <queue> 9 #include <map> 10 #include <set> 11 using namespace std; 12 #define sqr(x) ((x)*(x)) 13 #define RG register 14 #define op operator 15 #define IL inline 16 typedef double db; 17 typedef bool bl; 18 const db pi=acos(-1.0),eps=1e-10; 19 struct D{ 20 db x,y; 21 D(db x=0.0,db y=0.0):x(x),y(y){} 22 }; 23 typedef D V; 24 bl operator<(D A,D B){return A.x<B.x||(A.x==B.x&&A.y<B.y);} 25 bl operator==(D A,D B){return (fabs(A.x-B.x)<eps && fabs(A.y-B.y)<eps);} 26 V operator+(V A,V B){return V(A.x+B.x,A.y+B.y);} 27 V operator-(V A,V B){return V(A.x-B.x,A.y-B.y);} 28 V operator*(V A,db N){return V(A.x*N,A.y*N);} 29 V operator/(V A,db N){return V(A.x/N,A.y/N);} 30 31 db Ang(db x){return(x*180.0/pi);} 32 db Rad(db x){return(x*pi/180.0);} 33 V Rotate(V A,db a){return V(A.x*cos(a)-A.y*sin(a),A.x*sin(a)+A.y*cos(a));} 34 db Dis2(D A,D B){return sqr(A.x-B.x)+sqr(A.y-B.y);} 35 db Dis(D A,D B){return sqrt(sqr(A.x-B.x)+sqr(A.y-B.y));} 36 db Cross(V A,V B){return A.x*B.y-A.y*B.x;} 37 db Dot(V A,V B){return A.x*B.x+A.y*B.y;} 38 39 void Unique(D*R,int&n){ 40 bl*In=new bl[n]; 41 for(int i=1;i<=n;i++)if(R[i+1]==R[i])In[i+1]=1;else In[i]=0; 42 int cnt=0; 43 for(int i=1;i<=n;i++)if(!In[i])R[++cnt]=R[i]; 44 n=cnt; 45 } 46 47 int Andrew(D*R,int&n,D*A){ 48 int m=0; 49 sort(R+1,R+n+1); 50 Unique(R,n); 51 for(int i=1;i<=n;i++){ 52 while(m>=2 && Cross(A[m]-A[m-1],R[i]-A[m-1])<=0)m--; 53 A[++m]=R[i]; 54 } 55 int k=m; 56 for(int i=n-1;i>=1;i--){ 57 while(m>k && Cross(A[m]-A[m-1],R[i]-A[m-1])<=0)m--; 58 A[++m]=R[i]; 59 } 60 return n>1?m-1:m; 61 } 62 63 db RC(D*R,int n){ //Rotating calipers 64 R[0]=R[n]; // avoid to mod 65 db ans=0.0; 66 for(int u=0,v=1;u<n;u++){ 67 while(Cross(R[u+1]-R[u],R[v+1]-R[v])>0)v=(v+1)%n; 68 ans=max(ans,Dis2(R[u],R[v])); 69 ans=max(ans,Dis2(R[u+1],R[v+1])); 70 } 71 return ans; 72 } 73 74 const int MAXN=(int)4e5+10; 75 D R[MAXN],T[MAXN]; 76 77 int main(){ 78 int n;scanf("%d",&n); 79 for(int i=1;i<=n;i++)scanf("%lf%lf",&R[i].x,&R[i].y); 80 int m=Andrew(R,n,T); 81 printf("%.0lf\n",RC(T,m)); 82 return 0; 83 }
标签:之间 efi ota uniq 旋转 几何 cstring 感受 img
原文地址:http://www.cnblogs.com/JasonCow/p/6658279.html
