标签:判断 颜色 http div 没有 个数 查询 eval 运算
在计算机视觉中,对图像进行二值化恐怕是最常见的操作了。为了检测目标,可能需要对每一帧图像的每一个像素点进行运算。如果能提升二值化的速度,那么,你的算法的效率就会大大的提高。本文,将介绍一种超级快速的图像二值化技术。
要解决的问题:
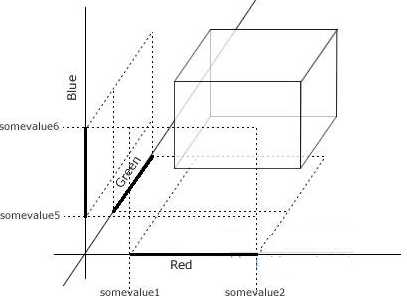
如上图所示,需要把彩色图像中,
(1) R通道介于(smoevalue1, somevalue2)
(2) G通道介于(somevalue3, somevalue4)
(3) B通道介于(somevalue5, somevalue6)
当图像中某个像素点同时满足上面3个条件时,将该像素点置为白色,否则置为黑色
1)常用方法介绍
常用的二值化方法,需要判断每一个通道的值是否在某个范围之内。伪代码如下:
1 if (redcomponent > somevalue1 && 2 redcomponent < somevalue2 && 3 greencomponent > somevalue3 && 4 greencomponent < somevalue4 && 5 bluecomponent > somevalue5 && 6 bluecomponent < somevalue6) 7 { 8 // 将该像素点置为白色 9 } 10 else 11 { 12 将该像素点置为黑色 13 }
问题是每个像素点的判断,需要6次比较操作,太复杂了。
2)新方法
方法(1)中,对每一个通道都需要比较两次。为了提高速度,需要减少比较次数。
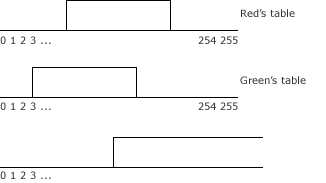
为B、G、R三个通道,每个通道创建一个大小为256的数组。该数组中的初始值,
例如R通道的数组,其在somevalue1到somevalue2,数组中的值是1,其他都是0;
G通道的数组,其在somevalue3到somevalue4,数组中的值是1,其他都是0;
B通道的数组,其在somevalue5到somevalue6,数组中的值是1,其他都是0。
如下图所示:
现在,如果要判断某个像素点应该标记为白色还是为黑色,只需要查询数组即可。伪代码如下:
1 if (table_red[redcomponent] && 2 table_green[greencomponent] && 3 table_blue[bluecomonent]) 4 { 5 // 将该像素点置为白色 6 } 7 else 8 { 9 将该像素点置为黑色 10 }
如果redcomponent的值介于(smoevalue1,somevalue2),那么table_red[redcomponent]=1,如果不在这个范围,那么table_red[redcomponent]=0.其他两个通道的值,也是同理。所以,如果条件(table_red[redcomponent] && table_green[greencomponent] && table_blue[bluecomonent])成立,就表示满足问题中的那3个条件。
3)对方法2的扩展
在方法2中,数组中只保存1或者0,这只需要一个bit 就ok了,如果上述的数组是int型(假设是32位),那么只是用了一个bit,还有31个bit没有是用,那么,其他的31个bit都可以表示一种颜色,就可以实现同时处理32种颜色了。
(4)效率的对比
图像大小(像素点个数) 方法1(ms) 方法2(ms)
73902 1.278624 0.394651
636000 5.791450 2.213925
1555200 13.664513 5.687084
通过实验,可以发现,方法2的速度快了300%。如果是用SIMD指令,速度会更快。
标签:判断 颜色 http div 没有 个数 查询 eval 运算
原文地址:http://www.cnblogs.com/eustoma/p/6664479.html