标签:坐标转换 pen paper lan .com res ase 转换 ima
四个坐标系分别为:世界坐标系(Ow),摄像机坐标系(Oc),图像物理坐标系(O1,单位mm),图像像素坐标系(O,位于视野平面的左上角,单位pix)。
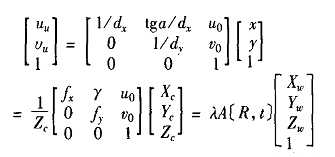
空间某点P到其像点p的坐标转换过程主要是通过这四套坐标系的三次转换实现的,首先将世界坐标系进行平移和转换得到摄像机坐标系,然后根据三角几何变换得到图像物理坐标系,最后根据像素和公制单位的比率得到图像像素坐标系。(实际的应用过程是这个的逆过程,即由像素长度获知实际的长度)
OpenCV中使用的求解焦距和成像原点的算法是基于张正友的方法( pdf ),而求解畸变参数是基于 Brown 的方法( pdf )。
标签:坐标转换 pen paper lan .com res ase 转换 ima
原文地址:http://www.cnblogs.com/Peit/p/6681900.html