标签:range 工作 分享 0.00 elf 空间 ++ data segment
超体聚类是一种图像的分割方法。
超体(supervoxel)是一种集合,集合的元素是“体”。与体素滤波器中的体类似,其本质是一个个的小方块。与大部分的分割手段不同,超体聚 类的目的并不是分割出某种特定物体,超体是对点云实施过分割(over segmentation),将场景点云化成很多小块,并研究每个小块之间的关系。这种将更小单元合并的分割思路已经出现了有些年份了,在图像分割中,像 素聚类形成超像素,以超像素关系来理解图像已经广为研究。本质上这种方法是对局部的一种总结,纹理,材质,颜色类似的部分会被自动的分割成一块,有利于后 续识别工作。比如对人的识别,如果能将头发,面部,四肢,躯干分开,则能更好的对各种姿态,性别的人进行识别。
点云和图像不一样,其不存在像素邻接关系。所以,超体聚类之前,必须以八叉树对点云进行划分,获得不同点团之间的邻接关系。与图像相似点云的邻接关系也有很多,如面邻接,线邻接,点邻接。
超体聚类实际上是一种特殊的区域生长算法,和无限制的生长不同,超体聚类首先需要规律的布置区域生长“晶核”。晶核在空间中实际上是均匀分布的,并指定晶核距离(Rseed)。再指定粒子距离(Rvoxel)。再指定最小晶粒(MOV),过小的晶粒需要融入最近的大晶粒。
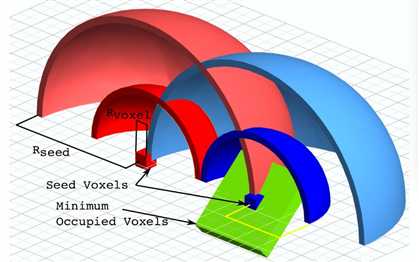
这些基本参数在接下来的参数中会有设置
#include <pcl/console/parse.h> #include <pcl/point_cloud.h> #include <pcl/point_types.h> #include <pcl/io/pcd_io.h> #include <pcl/visualization/pcl_visualizer.h> #include <pcl/segmentation/supervoxel_clustering.h> //VTK include needed for drawing graph lines #include <vtkPolyLine.h> // 数据类型 typedef pcl::PointXYZRGBA PointT; typedef pcl::PointCloud<PointT> PointCloudT; typedef pcl::PointNormal PointNT; typedef pcl::PointCloud<PointNT> PointNCloudT; typedef pcl::PointXYZL PointLT; typedef pcl::PointCloud<PointLT> PointLCloudT; //可视化 void addSupervoxelConnectionsToViewer (PointT &supervoxel_center, PointCloudT &adjacent_supervoxel_centers, std::string supervoxel_name, boost::shared_ptr<pcl::visualization::PCLVisualizer> & viewer); int main (int argc, char ** argv) { //解析命令行 if (argc < 2) { pcl::console::print_error ("Syntax is: %s <pcd-file> \n " "--NT Dsables the single cloud transform \n" "-v <voxel resolution>\n-s <seed resolution>\n" "-c <color weight> \n-z <spatial weight> \n" "-n <normal_weight>\n", argv[0]); return (1); } //打开点云 PointCloudT::Ptr cloud = boost::shared_ptr <PointCloudT> (new PointCloudT ()); pcl::console::print_highlight ("Loading point cloud...\n"); if (pcl::io::loadPCDFile<PointT> (argv[1], *cloud)) { pcl::console::print_error ("Error loading cloud file!\n"); return (1); } bool disable_transform = pcl::console::find_switch (argc, argv, "--NT"); float voxel_resolution = 0.008f; //分辨率 bool voxel_res_specified = pcl::console::find_switch (argc, argv, "-v"); if (voxel_res_specified) pcl::console::parse (argc, argv, "-v", voxel_resolution); float seed_resolution = 0.1f; bool seed_res_specified = pcl::console::find_switch (argc, argv, "-s"); if (seed_res_specified) pcl::console::parse (argc, argv, "-s", seed_resolution); float color_importance = 0.2f; if (pcl::console::find_switch (argc, argv, "-c")) pcl::console::parse (argc, argv, "-c", color_importance); float spatial_importance = 0.4f; if (pcl::console::find_switch (argc, argv, "-z")) pcl::console::parse (argc, argv, "-z", spatial_importance); float normal_importance = 1.0f; if (pcl::console::find_switch (argc, argv, "-n")) pcl::console::parse (argc, argv, "-n", normal_importance); //如何使用SupervoxelClustering函数 pcl::SupervoxelClustering<PointT> super (voxel_resolution, seed_resolution); if (disable_transform)//如果设置的是参数--NT 就用默认的参数 super.setUseSingleCameraTransform (false); super.setInputCloud (cloud); super.setColorImportance (color_importance); //0.2f super.setSpatialImportance (spatial_importance); //0.4f super.setNormalImportance (normal_importance); //1.0f std::map <uint32_t, pcl::Supervoxel<PointT>::Ptr > supervoxel_clusters; pcl::console::print_highlight ("Extracting supervoxels!\n"); super.extract (supervoxel_clusters); pcl::console::print_info ("Found %d supervoxels\n", supervoxel_clusters.size ()); boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer (new pcl::visualization::PCLVisualizer ("3D Viewer")); viewer->setBackgroundColor (0, 0, 0); PointCloudT::Ptr voxel_centroid_cloud = super.getVoxelCentroidCloud ();//获得体素中心的点云 viewer->addPointCloud (voxel_centroid_cloud, "voxel centroids"); viewer->setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE,2.0, "voxel centroids"); //渲染点云 viewer->setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_OPACITY,0.95, "voxel centroids"); PointLCloudT::Ptr labeled_voxel_cloud = super.getLabeledVoxelCloud (); viewer->addPointCloud (labeled_voxel_cloud, "labeled voxels"); viewer->setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_OPACITY,0.8, "labeled voxels"); PointNCloudT::Ptr sv_normal_cloud = super.makeSupervoxelNormalCloud (supervoxel_clusters); //We have this disabled so graph is easy to see, uncomment to see supervoxel normals //viewer->addPointCloudNormals<PointNormal> (sv_normal_cloud,1,0.05f, "supervoxel_normals"); pcl::console::print_highlight ("Getting supervoxel adjacency\n"); std::multimap<uint32_t, uint32_t> supervoxel_adjacency; super.getSupervoxelAdjacency (supervoxel_adjacency); //To make a graph of the supervoxel adjacency, we need to iterate through the supervoxel adjacency multimap //为了使整个超体形成衣服图,我们需要遍历超体的每个临近的个体 std::multimap<uint32_t,uint32_t>::iterator label_itr = supervoxel_adjacency.begin (); for ( ; label_itr != supervoxel_adjacency.end (); ) { //First get the label uint32_t supervoxel_label = label_itr->first; //Now get the supervoxel corresponding to the label pcl::Supervoxel<PointT>::Ptr supervoxel = supervoxel_clusters.at (supervoxel_label); //Now we need to iterate through the adjacent supervoxels and make a point cloud of them PointCloudT adjacent_supervoxel_centers; std::multimap<uint32_t,uint32_t>::iterator adjacent_itr = supervoxel_adjacency.equal_range (supervoxel_label).first; for ( ; adjacent_itr!=supervoxel_adjacency.equal_range (supervoxel_label).second; ++adjacent_itr) { pcl::Supervoxel<PointT>::Ptr neighbor_supervoxel = supervoxel_clusters.at (adjacent_itr->second); adjacent_supervoxel_centers.push_back (neighbor_supervoxel->centroid_); } //Now we make a name for this polygon std::stringstream ss; ss << "supervoxel_" << supervoxel_label; //This function is shown below, but is beyond the scope of this tutorial - basically it just generates a "star" polygon mesh from the points given //从给定的点云中生成一个星型的多边形, addSupervoxelConnectionsToViewer (supervoxel->centroid_, adjacent_supervoxel_centers, ss.str (), viewer); //Move iterator forward to next label label_itr = supervoxel_adjacency.upper_bound (supervoxel_label); } while (!viewer->wasStopped ()) { viewer->spinOnce (100); } return (0); } //VTK可视化构成的聚类图 void addSupervoxelConnectionsToViewer (PointT &supervoxel_center, PointCloudT &adjacent_supervoxel_centers, std::string supervoxel_name, boost::shared_ptr<pcl::visualization::PCLVisualizer> & viewer) { vtkSmartPointer<vtkPoints> points = vtkSmartPointer<vtkPoints>::New (); vtkSmartPointer<vtkCellArray> cells = vtkSmartPointer<vtkCellArray>::New (); vtkSmartPointer<vtkPolyLine> polyLine = vtkSmartPointer<vtkPolyLine>::New (); //Iterate through all adjacent points, and add a center point to adjacent point pair PointCloudT::iterator adjacent_itr = adjacent_supervoxel_centers.begin (); for ( ; adjacent_itr != adjacent_supervoxel_centers.end (); ++adjacent_itr) { points->InsertNextPoint (supervoxel_center.data); points->InsertNextPoint (adjacent_itr->data); } // Create a polydata to store everything in vtkSmartPointer<vtkPolyData> polyData = vtkSmartPointer<vtkPolyData>::New (); // Add the points to the dataset polyData->SetPoints (points); polyLine->GetPointIds ()->SetNumberOfIds(points->GetNumberOfPoints ()); for(unsigned int i = 0; i < points->GetNumberOfPoints (); i++) polyLine->GetPointIds ()->SetId (i,i); cells->InsertNextCell (polyLine); // Add the lines to the dataset polyData->SetLines (cells); viewer->addModelFromPolyData (polyData,supervoxel_name); }
可执行文件生成后的图像显示如下
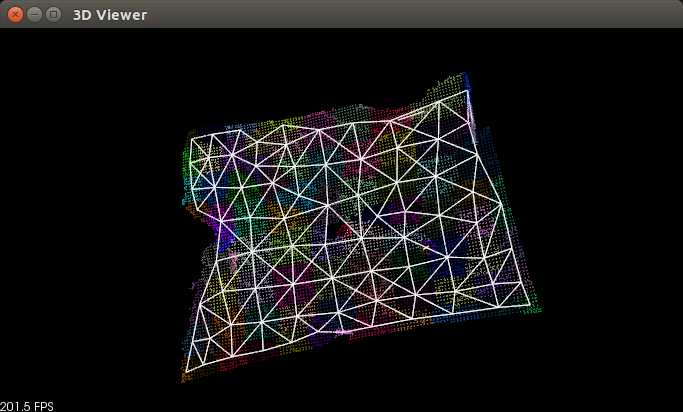
当然也可以自己设定参数生成自己想要的效果。同时在不同的场景中,使用的参数是十分重要的,
只是先了解超体的概念,如果想应用到实际的应用中,还需要很多其他的知识 ,所以这里只是基本的学习
有兴趣这关注我的微信公众号

标签:range 工作 分享 0.00 elf 空间 ++ data segment
原文地址:http://www.cnblogs.com/li-yao7758258/p/6628175.html