标签:length img hand *** ima image 设置 void err
有一次做一个东西,为了尽量不占用CPU的处理数据时间,所以就使用DMA接收串口的数据,但是呢问题来了.,,,,,怎么样才能确定接收到了一条完整的数据了,,我们都知道只要打开DMA
那家伙就不停的把接收的数据放到我们指定的地方.
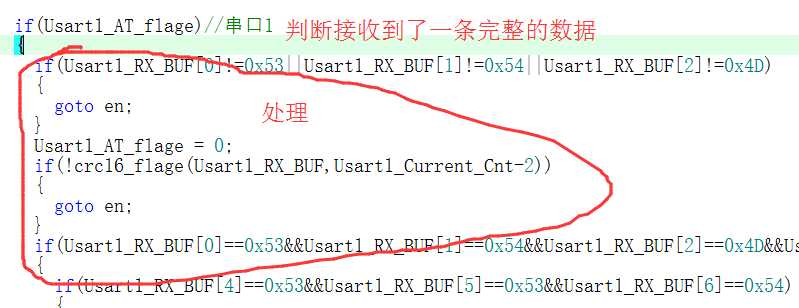
只要接收到一条完整的数据我就该去处理了
关于空闲中断,,,就是说每接收到一条完整的数据就会置位空闲标志位,我们只需要判断空闲标志位是否置一,,就能知道是不是接收到了一条完整的数据
用空闲中断的好处就是,,对于以前我写程序通信都会在数据的后面加上尾,,然后另一个接收的单片机通过判断数据的尾来确定是不是一条完整的数据,,,有了空闲中断就不需要在给数据加上尾了,,,,,
直接程序吧
u8 Usart1_RX_Cop[1024]={0}; //串口2备用接收缓冲,最大 1024 个字节. u8 Usart1_RX_BUF[1024]={0}; //串口1接收缓冲,最大 1024 个字节. u16 Usart1_REC_Cnt = 0; //串口1接收的数据个数 u16 Usart1_Current_Cnt = 0; //串口1当前接收的数据个数 u16 Usart1_Current_cnt = 0; //串口1当前接收的数据个数 u8 Usart1_AT_flage = 0; //串口1接收完成标志位 u8 Usart2_RX_Cop[1024]={0}; //串口2备用接收缓冲,最大 1024 个字节. u8 Usart2_RX_BUF[1024]={0}; //串口2接收缓冲,最大 1024 个字节. u16 Usart2_REC_Cnt = 0; //串口2接收的数据个数 u16 Usart2_Current_Cnt = 0; //串口2当前接收的数据个数 u16 Usart2_Current_cnt = 0; //串口2当前接收的数据个数 u8 Usart2_AT_flage = 0; //串口2接收完成标志位 u8 Usart3_RX_BUF[1024]={0}; //串口3接收缓冲,最大 1024 个字节. u16 Usart3_REC_Cnt = 0; //串口3接收的数据个数 u8 Usart3_AT_flage = 0; //串口3接收完成标志位 u8 Free_Read_Rst = 0;//读DR清除空闲中断
void USART123_Init(uint32_t bound_1,uint32_t bound_2,uint32_t bound_3) { USART_InitTypeDef USART_InitStructure; GPIO_InitTypeDef GPIO_InitStructure; RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2|RCC_APB1Periph_USART3, ENABLE);//使能USART2,USART3时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOB|RCC_APB2Periph_USART1|RCC_APB2Periph_AFIO , ENABLE); //USART1_TX PA9 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure); //USART1_RX PA10 GPIO_InitStructure.GPIO_Mode =GPIO_Mode_IN_FLOATING ; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; GPIO_Init(GPIOA, &GPIO_InitStructure); //USART2_TX GPIOA.2 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; //PA.2 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出 GPIO_Init(GPIOA, &GPIO_InitStructure); //USART2_RX GPIOA.3初始化 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;//PA3 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入 GPIO_Init(GPIOA, &GPIO_InitStructure); //USART3_TX GPIOB.10 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //PB10 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出 GPIO_Init(GPIOB, &GPIO_InitStructure); //USART3_RX GPIOB.11初始化 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;//PB11 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入 GPIO_Init(GPIOB, &GPIO_InitStructure); USART_InitStructure.USART_BaudRate = bound_1; USART_InitStructure.USART_WordLength = USART_WordLength_8b; USART_InitStructure.USART_StopBits = USART_StopBits_1; USART_InitStructure.USART_Parity = USART_Parity_No ; USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; USART_Init(USART1, &USART_InitStructure); USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); //开启串口接受中断 USART_ITConfig(USART2, USART_IT_RXNE, ENABLE); //开启串口接受中断 USART_ITConfig(USART3, USART_IT_RXNE, ENABLE); //开启串口接受中断 USART_ITConfig(USART1, USART_IT_IDLE, ENABLE); //开启串口1总线空闲中断 USART_ITConfig(USART2, USART_IT_IDLE, ENABLE); //开启串口2总线空闲中断 USART_InitStructure.USART_BaudRate = bound_2; USART_Init(USART2, &USART_InitStructure); USART_InitStructure.USART_BaudRate = bound_3; USART_Init(USART3, &USART_InitStructure); USART_Cmd(USART1, ENABLE); USART_Cmd(USART2, ENABLE); USART_Cmd(USART3, ENABLE); }
/********************串口 1 中断服务程序**********************/ void USART1_IRQHandler(void) { if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //正常情况下进入这个接收 { USART_ClearITPendingBit(USART1, USART_FLAG_ORE); USART_ClearITPendingBit(USART1,USART_IT_ORE); //清除中断标志 Usart1_RX_BUF[Usart1_REC_Cnt] =USART_ReceiveData(USART1); //读取接收到的数据 Usart1_REC_Cnt++; } else if(USART_GetITStatus(USART1,USART_IT_IDLE) == SET)//传输完一条完整的数据就会进入这个 { Free_Read_Rst = USART1->DR; //清USART_IT_IDLE标志 Usart1_AT_flage = 1;//接收到一条完整的数据 Usart1_Current_Cnt = Usart1_REC_Cnt;//复制接收到的数据个数 Usart1_REC_Cnt = 0;//清零接收的个数 } }
主函数循环里只需要......
其实昨天才发现这家伙真的太准确了,,准确到如果碰见通信中速率如果受到干扰变得不稳定,那么这家伙也会进空闲中断.......
所以嘛,,,,,自己写个别这么苛刻的,昨天写好了,不过呢今天主要是把自己遇到的问题说一下
其实思路都知道
串口接收的时候打开一个定时器,并且只要接收到数据就清零一个变量,这个变量是在定时器里面执行自加一操作,,
如果串口一段时间不接收数据了这个变量就能自加到我们设置的数,然后关掉定时器,置位接收完成标志位,...
直接上程序
/********************串口 1 中断服务程序**********************/ void USART1_IRQHandler(void) { if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) { USART_ClearITPendingBit(USART1, USART_FLAG_ORE); USART_ClearITPendingBit(USART1,USART_IT_ORE); //清除中断标志 Usart1_RX_BUF[Usart1_REC_Cnt] =USART_ReceiveData(USART1); //读取接收到的数据 Usart1_REC_Cnt++; TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE );//打开定时器开始计时 Time2_cnt = 0;//清零计数 }
}
void timer_config(void) { TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); /* Resets the TIM2 */ TIM_DeInit(TIM2); //设置了时钟分割。 TIM_TimeBaseStructure.TIM_ClockDivision = 0; // 选择了计数器模式。 TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //初值 TIM_TimeBaseStructure.TIM_Period = 10;//定时时间1ms进一次 //设置了用来作为 TIMx 时钟频率除数的预分频值。72M / 7099+1 = 0.01M TIM_TimeBaseStructure.TIM_Prescaler = 7199; //TIM_TimeBaseStructure.TIM_RepetitionCounter = 0; TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure); TIM_ClearITPendingBit(TIM2, TIM_IT_Update); /* Enables the TIM2 counter */ TIM_Cmd(TIM2, ENABLE); /* Enables the TIM2 Capture Compare channel 1 Interrupt source */ TIM_ITConfig(TIM2, TIM_IT_Update, DISABLE ); }
void TIM2_IRQHandler(void) { if(TIM_GetITStatus(TIM2, TIM_IT_Update) == SET) { TIM_ClearITPendingBit(TIM2, TIM_IT_Update); if(Time2_cnt<100)//防止累加循环过去 { Time2_cnt ++ ; } if(Time2_cnt>3)//空闲时间大于约3毫秒 { TIM_ITConfig(TIM2, TIM_IT_Update, DISABLE );//关闭定时器---注意千万不要放到主函数里面关,,,,大家可以试一试会出现什么问题..... Usart1_AT_flage = 1;//接收完成标志位置一 Usart1_Current_Cnt = Usart1_REC_Cnt;//赋值接收的数据个数 Usart1_REC_Cnt = 0;//清零接收的数据个数 }
}
源码,,这个是用的板子的空闲中断,,,,板子的其余文件删掉便可,,,,
链接:http://pan.baidu.com/s/1c228q6c 密码:pl3k
标签:length img hand *** ima image 设置 void err
原文地址:http://www.cnblogs.com/yangfengwu/p/6746403.html