标签:导致 frame 分享 人物 logs 矩阵 tom .com mat
如何描述三维空间中刚体的旋转,是个有趣的问题。具体地说,就是刚体上的任意一个点P(x, y, z)围绕过原点的轴(i, j, k)旋转θ,求旋转后的点P\‘(x\‘, y\‘, z\‘)。
旋转矩阵乘以点P的齐次坐标,得到旋转后的点P‘,因此旋转矩阵可以描述旋转,
绕x,y,或z轴旋转θ的矩阵为:
所以,绕任意轴旋转的矩阵为
这表示:
1. 绕x轴旋转角度p使指定的旋转轴在xz平面上
2. 绕y轴旋转角度q使指定的旋转轴与z轴重合
3. 绕z轴旋转角度θ
4. 绕y轴旋转角度-q
5. 绕x轴旋转角度-p
其中,p和q的值需要用i,j,k计算出来。
欧拉角也可以描述三维刚体旋转,它将刚体绕过原点的轴(i,j,k)旋转θ,分解成三步(蓝色是起始坐标系,而红色的是旋转之后的坐标系。)。
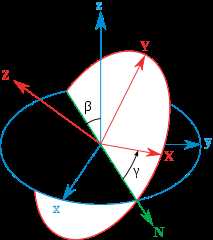
1. 绕z轴旋转α,使x轴与N轴重合,N轴是旋转前后两个坐标系x-y平面的交线
2. 绕x轴(也就是N轴)旋转β,使z轴与旋转后的z轴重合
3. 绕z轴旋转γ,使坐标系与旋转后的完全重合
按照旋转轴的顺序,该组欧拉角被称为是“zxz顺规”的。对于顺规的次序,学术界没有明确的约定。
欧拉角的旋转矩阵为:
在旋转矩阵一节中,最先进行的旋转其矩阵在最右侧,说明该矩阵最先与点的齐次坐标相乘,旋转矩阵按照旋转的次序从右向左排列。而在欧拉角中,最先进行的旋转其旋转矩阵在最左边。这是因为,**对于前者(旋转矩阵),我们始终是以绝对参考系为参照来的,对于后者(欧拉角),我们每一次旋转的刻画都是基于刚体的坐标系。**比如,在欧拉角中的第2步,绕x轴旋转β,这里的x轴实际上是N轴了(而不是蓝色的x轴)。
为什么旋转参考系的不同会导致旋转矩阵次序的差异呢?细想一下便知,旋转矩阵左乘叠加用以描述三维变换效果的叠加,这本身就是基于绝对坐标系的,所以旋转矩阵一节没有疑问;而对于欧拉角一节的这种旋转方式,这样考虑:
1. 如果有一个“影子坐标系3”与原坐标系重合,然后首先进行了第3步(绕z轴旋转γ);
2. 然后有一个“影子坐标系2”也与原坐标系重合,然后与“影子坐标系3”一起(视作同一个刚体)进行了第二步;
3. 最后一个“影子坐标系1”,与前两个坐标系一起进行了第一步。
此时,考察“影子坐标系”1和2,他们就分别落在了欧拉角旋转的两个“快照”上,而“影子坐标系3”就落在旋转后的位置上(红色的)。而在上述过程中,“影子坐标系3”就是相对于绝对坐标系依次进行了第三步,第二步,和第一步。所以欧拉角的旋转矩阵写成那样,也是行得通的。
这个想法,我猜在很多第一人称游戏中,已经得到了广泛应用了。这样,玩家对人物的控制就可以绕开人物的实时状态(位置,角度等)直接对人物的模型矩阵产生影响。
万向节死锁是欧拉角的一个弊端,这是一个直观的例子。
四元数是今天的主角,它能够很方便的刻画刚体绕任意轴的旋转。四元数是一种高阶复数,四元数q表示为:
其中,i,j,k满足:
由于i,j,k的性质和笛卡尔坐标系三个轴叉乘的性质很像,所以可以将四元数写成一个向量和一个实数组合的形式:
可以推导出四元数的一些运算性质,包括:
* 四元数乘法
* 共轭四元数
* 四元数的平方模
* 四元数的逆
四元数可以看做是向量和实数的一种更加一般的形式,向量可以视作为实部为0的四元数,而实数可以是作为虚部为0的四元数。上述四元数的运算性质也是实数或向量的运算性质的更一般的形式。
四元数可用来刻画三维空间中的旋转,绕单位向量(x,y,z)表示的轴旋转θ,可令:
刚体坐标系中的点p(P,0)(写成四元数的形式),旋转后的坐标p‘为:
接下来我们来证明这一点。
首先,我们证明
qpq?1=(sq)p(sq)?1qpq?1=(sq)p(sq)?1
其中s为实数。显然
此时,我们可以将q看做是单位矩阵,因为如果q不是单位矩阵,我们就可以乘以一个常数s将其化为单位矩阵。
然后,我们证明qpq^{-1}和p的模长相等
下面将q视为单位四元数:
四元数q的标量:
那么:
最后,我们证明
如图所示,u为旋转轴,旋转角度为σ,向量v旋转到w处。旋转到σ/2处为k(图中未标出)。
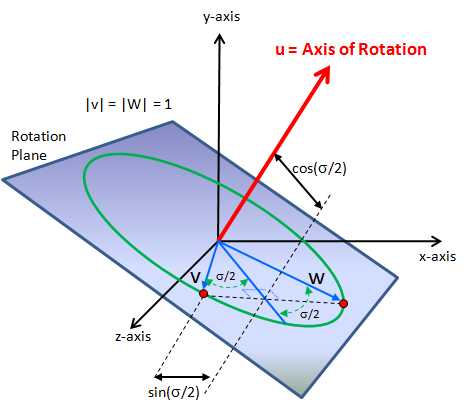
下面也用相同的字母指代四元数,如u就表示向量u的四元数形式((ux,uy,uz),0)。
首先,令u方向上的单位向量为u(为了方便,命名不变,后面的u都是指旋转轴方向的单位四元数),那么根据q的定义,参见四元数乘法法则:
现在令
如果能证明w与v的夹角是σ,那么就说明w确实是v旋转σ得到的,整个命题就得证了。
注意v,k和w都是实部为0的单位四元数,表示单位向量,我们有:
所以
上面的式子拆分成实部和虚部,虚部表明w与-k的平面和k与-v的平面重合,实部表明w和-k之间的夹角与k和-v之间的夹角相等,都是π-σ/2。这就说明了w与v的夹角是σ,原命题就得证了。
转自http://www.cnblogs.com/yiyezhai/p/3176725.html
标签:导致 frame 分享 人物 logs 矩阵 tom .com mat
原文地址:http://www.cnblogs.com/blue35sky/p/6750131.html