标签:技术分享 title src res val htm initial php 网页
转载链接:http://www.cnblogs.com/tornadomeet/archive/2013/03/17/2964858.html
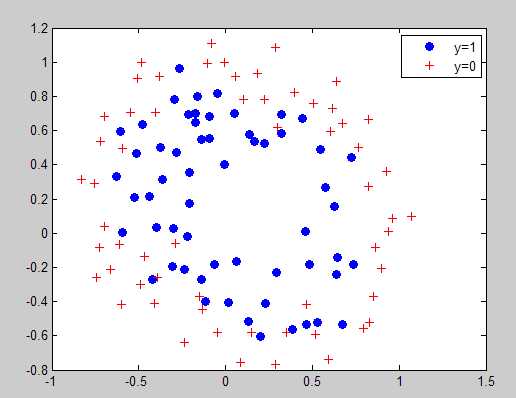
在上一讲Deep learning:五(regularized线性回归练习)中已经介绍了regularization项在线性回归问题中的应用,这节主要是练习regularization项在logistic回归中的应用,并使用牛顿法来求解模型的参数。参考的网页资料为:http://openclassroom.stanford.edu/MainFolder/DocumentPage.php?course=DeepLearning&doc=exercises/ex5/ex5.html。要解决的问题是,给出了具有2个特征的一堆训练数据集,从该数据的分布可以看出它们并不是非常线性可分的,因此很有必要用更高阶的特征来模拟。例如本程序中个就用到了特征值的6次方来求解。
实验基础:
contour:
该函数是绘制轮廓线的,比如程序中的contour(u, v, z, [0, 0], ‘LineWidth‘, 2),指的是在二维平面U-V中绘制曲面z的轮廓,z的值为0,轮廓线宽为2。注意此时的z对应的范围应该与U和V所表达的范围相同。因为contour函数是用来等高线,而本实验中只需画一条等高线,所以第4个参数里面的值都是一样的,这里为[0,0],0指的是函数值z在0和0之间的等高线(很明显,只能是一条)。
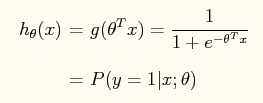
在logistic回归中,其表达式为:
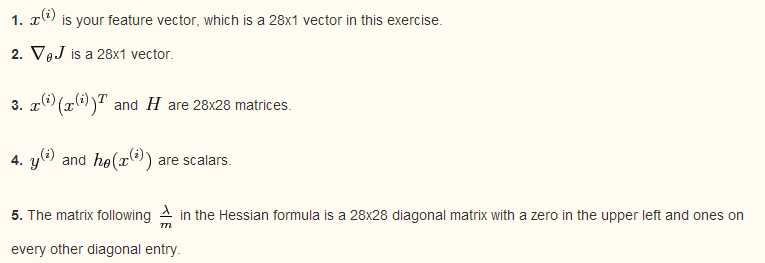
在此问题中,将特征x映射到一个28维的空间中,其x向量映射后为:

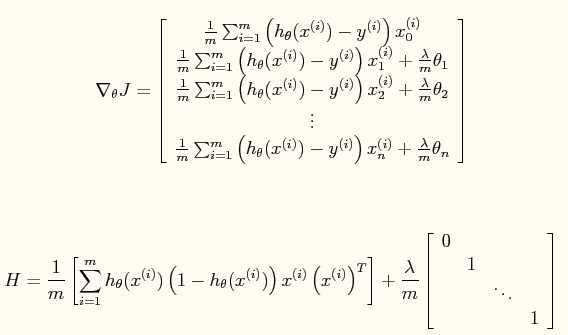
此时加入了规则项后的系统的损失函数为:

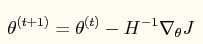
对应的牛顿法参数更新方程为:
其中:
公式中的一些宏观说明(直接截的原网页):
实验结果:
原训练数据点的分布情况:
当lambda=0时所求得的分界曲面:

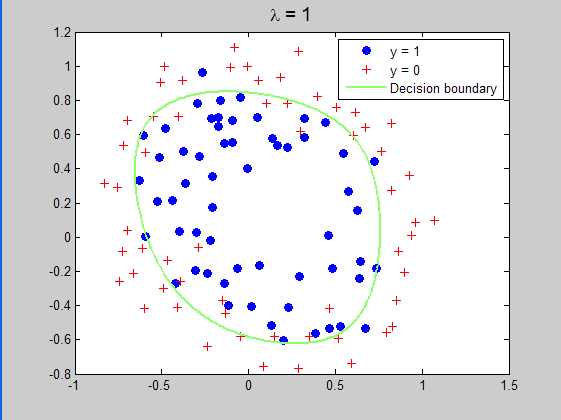
当lambda=1时所求得的分界曲面:
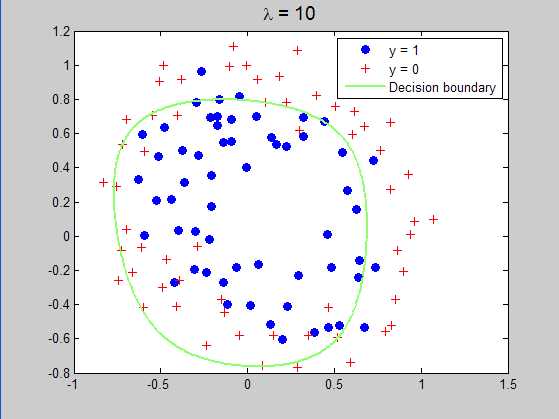
当lambda=10时所求得的分界曲面:
实验程序代码:
%载入数据 clc,clear,close all; x = load(‘ex5Logx.dat‘); y = load(‘ex5Logy.dat‘); %画出数据的分布图 plot(x(find(y),1),x(find(y),2),‘o‘,‘MarkerFaceColor‘,‘b‘) hold on; plot(x(find(y==0),1),x(find(y==0),2),‘r+‘) legend(‘y=1‘,‘y=0‘) % Add polynomial features to x by % calling the feature mapping function % provided in separate m-file x = map_feature(x(:,1), x(:,2)); %map_feature函数是什么? [m, n] = size(x); % Initialize fitting parameters theta = zeros(n, 1); % Define the sigmoid function g = inline(‘1.0 ./ (1.0 + exp(-z))‘); % setup for Newton‘s method MAX_ITR = 15; J = zeros(MAX_ITR, 1); % Lambda is the regularization parameter lambda = 1;%lambda=0,1,10,修改这个地方,运行3次可以得到3种结果。 % Newton‘s Method for i = 1:MAX_ITR % Calculate the hypothesis function z = x * theta; h = g(z); % Calculate J (for testing convergence) J(i) =(1/m)*sum(-y.*log(h) - (1-y).*log(1-h))+ ... (lambda/(2*m))*norm(theta([2:end]))^2; % Calculate gradient and hessian. G = (lambda/m).*theta; G(1) = 0; % extra term for gradient L = (lambda/m).*eye(n); L(1) = 0;% extra term for Hessian grad = ((1/m).*x‘ * (h-y)) + G; H = ((1/m).*x‘ * diag(h) * diag(1-h) * x) + L; % Here is the actual update theta = theta - H\grad; end % Show J to determine if algorithm has converged J % display the norm of our parameters norm_theta = norm(theta) % Plot the results % We will evaluate theta*x over a % grid of features and plot the contour % where theta*x equals zero % Here is the grid range u = linspace(-1, 1.5, 200); v = linspace(-1, 1.5, 200); z = zeros(length(u), length(v)); % Evaluate z = theta*x over the grid for i = 1:length(u) for j = 1:length(v) z(j,i) = map_feature(u(i), v(j))*theta;%这里绘制的并不是损失函数与迭代次数之间的曲线,而是线性变换后的值 end end z = z‘; % important to transpose z before calling contour % Plot z = 0 % Notice you need to specify the range [0, 0] contour(u, v, z, [0, 0], ‘LineWidth‘, 2)%在z上画出为0值时的界面,因为为0时刚好概率为0.5,符合要求 legend(‘y = 1‘, ‘y = 0‘, ‘Decision boundary‘) title(sprintf(‘\\lambda = %g‘, lambda), ‘FontSize‘, 14) hold off % Uncomment to plot J % figure % plot(0:MAX_ITR-1, J, ‘o--‘, ‘MarkerFaceColor‘, ‘r‘, ‘MarkerSize‘, 8) % xlabel(‘Iteration‘); ylabel(‘J‘)
疑问: 上文中的map_feature是什么函数?
六、regularized logisitic regssion练习(转载)
标签:技术分享 title src res val htm initial php 网页
原文地址:http://www.cnblogs.com/zf-blog/p/6814847.html