标签:芯片 hold 右键 lock type 程序开发 padding dstar 声明


所以“09”具有最高的灵敏度。
“00” 240
“01” 200
“02” 160
“03” 140
“04” 120
“05” 100
“06” 60
“07” 40
“08” 20
“09” 0
uint8 u8_Immunity[2]; 抗干扰性
“00”:1次均值
“01”:2次均值
“02”:3次均值
“03”:4次均值
“04”:5次均值
“05”:6次均值
“06”:7次均值
“07”:8次均值
“08”:9次均值
“09”:10次均值
uint8 u8_SensorType[2]; 传感器类型
“00”:双通道传感器
“01”:单通道传感器
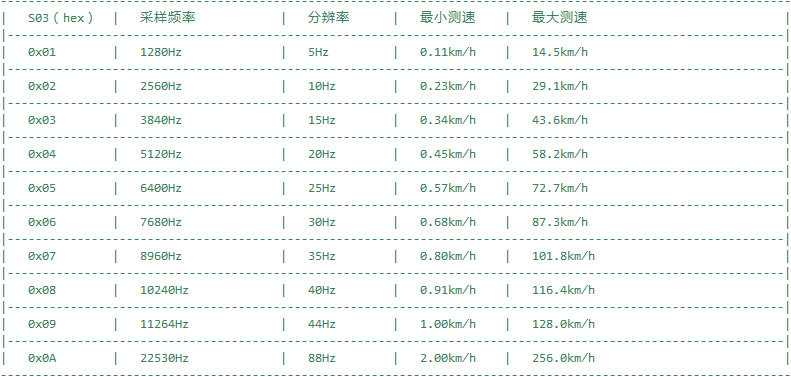
uint8 u8_SamplingRate[2]; 採样率,採样率与检測速度相应表见注3
“01”:1280Hz
“02”:2560Hz
“03”:3840Hz
“04”:5120Hz
“05”:6400Hz
“06”:7680Hz
“07”:8960Hz
“08”:10240Hz
“09”:11246Hz
Bool ReadHoldTime(void); 读取保持时间。数据存于u8_HoldTime成员变量中。
Bool WriteHoldTime(void); 写入保持时间。数据存于u8_HoldTime成员变量中。
Bool WriteImmunity(void); 写入抗干扰性,数据存于u8_Immunity成员变量中。
Bool ReadSensorType(void); 读取传感器类型,数据存于u8_SensorType成员变量中。
Bool ReadSamplingRate(void); 读取採样率,数据存于u8_SamplingRate成员变量中。
Bool WriteSamplingRate(void);写入採样率。数据存于u8_SamplingRate成员变量中。
Bool ReadStartUpLearn(void); 读取启动噪声平均时间,数据存于u8_StartUpLearn成员变量中。
Bool WriteStartUpLearn(void);写入启动噪声平均时间,数据存于u8_StartUpLearn成员变量中。
Bool ReadSensitivityPotentiometer(void);读取电位设置灵敏度,数据存于u8_SensitivityPotentiometer成员变量中。
Bool WriteSensitivityPotentiometer(void);写入电位设置灵敏度。数据存于u8_SensitivityPotentiometer成员变量中。
Bool ReadADCgain(void); 读取ADC增益。数据存于u8_ADCgain成员变量中。
Bool WriteADCgain(void);
写入ADC增益,数据存于u8_ADCgain成员变量中。
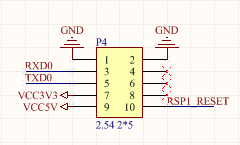
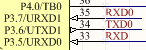
MSP430WARE++的使用2:RSP1 driver的调用方法
标签:芯片 hold 右键 lock type 程序开发 padding dstar 声明
原文地址:http://www.cnblogs.com/gavanwanggw/p/6881326.html