标签:system measure 系统 man lin str 观测 line date
卡尔曼滤波的使用范围:
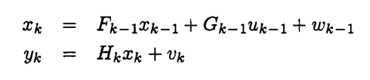
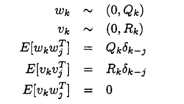
该系统要有如下关系:
计算步骤:
PART0:INI


PART1:Time update


迭代的目标:从X(K-1)+ 求得X(K) +
因此,先有X(K-1)+,已知F,G。得到X(K) -。再由K(k),y(k) 求得X(K)+。
但是K(k)需要P(K)-,P(K)-需要从(K-1)+得到。所以要算P(k)-。
为了保证迭代的继续还要计算P(K)+。
第一公式是假设:linear discrete-time system
第二公式推导:

![]()

![]()
此时只有先验概率
Part2 Measure Update(ONLY FOR XK+)
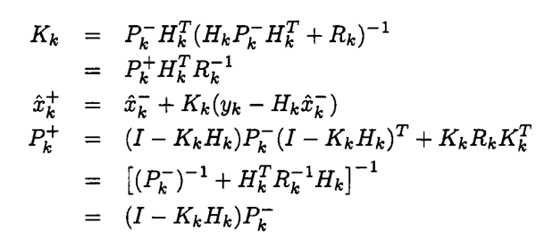



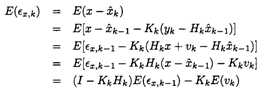
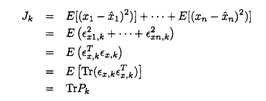
第三公式的推导:
此时由于有了观测量,因此有了后验概率

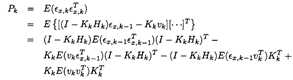
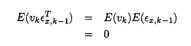

第二公式的推导:说明 I-KH要对称,且K要对称。
为了使得Pk最小,Kk必须与Pk-1配合使用。与前一个状态相关。


标签:system measure 系统 man lin str 观测 line date
原文地址:http://www.cnblogs.com/gaoxianzhi/p/6884361.html