标签:floating origin highlight ping soft frame lin join blog
URDF的关节定义:
<joint name="my_joint" type="floating">
<origin xyz="0 0 1" rpy="0 0 3.1416"/>
<parent link="link1"/>
<child link="link2"/>
<calibration rising="0.0"/>
<dynamics damping="0.0" friction="0.0"/>
<limit effort="30" velocity="1.0" lower="-2.2" upper="0.7" />
<safety_controller k_velocity="10" k_position="15" soft_lower_limit="-2.0" soft_upper_limit="0.5" />
</joint>
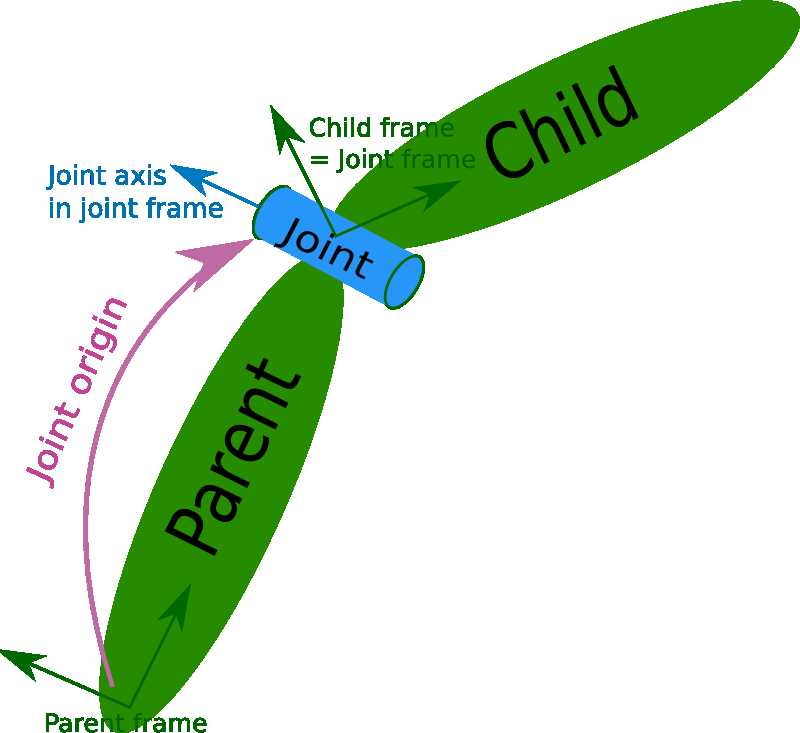
关节里面首先定了父link跟子link, 以及关节的转动轴.
接着是传感器的定义:
摄像头:
<sensor name="my_camera_sensor" update_rate="20">
<parent link="optical_frame_link_name"/>
<origin xyz="0 0 0" rpy="0 0 0"/>
<camera>
<image width="640" height="480" hfov="1.5708" format="RGB8" near="0.01" far="50.0"/>
</camera>
</sensor>
激光传感器:
<sensor name="my_ray_sensor" update_rate="20">
<parent link="optical_frame_link_name"/>
<origin xyz="0 0 0" rpy="0 0 0"/>
<ray>
<horizontal samples="100" resolution="1" min_angle="-1.5708" max_angle="1.5708"/>
<vertical samples="1" resolution="1" min_angle="0" max_angle="0"/>
</ray>
</sensor>
标签:floating origin highlight ping soft frame lin join blog
原文地址:http://www.cnblogs.com/Montauk/p/6912037.html