标签:ural 不同 poi 最优 9.png hle 估计 计数 tin
本讲内容
1. Newton‘s method(牛顿法)
2. Exponential Family(指数簇)
3. Generalized Linear Models(GLMs)(广义线性模型)
1.牛顿法
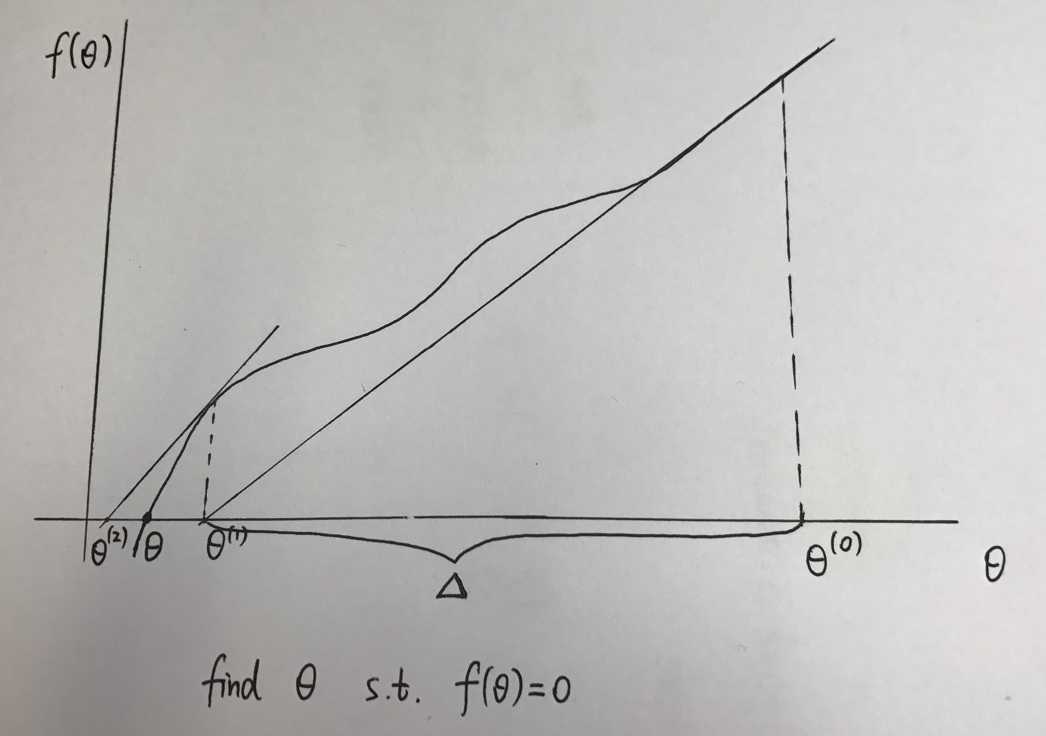
假如有函数 , 寻找
, 寻找 使得
使得
牛顿法的步骤如下:
(1) initialize  as some value. 上图中用
as some value. 上图中用  初始化
初始化 的值
的值
(2) 在这一点上对f求值得到 ,之后计算这一点的导数值
,之后计算这一点的导数值
(3) 作该点的切线,得到与横轴的交点的值 ,此为牛顿法的一次迭代。
,此为牛顿法的一次迭代。
更新公式为


我们可以使用牛顿法取代梯度上升法作极大似然估计
对对数似然函数 , want
, want  s.t.
s.t. 
对于一次迭代,
通常来说,牛顿法对函数f有一定的要求(具体没说),牛顿法对logistic函数效果很好。
的初始值并不会对牛顿法收敛的结果产生影响。
牛顿法的收敛属于二次收敛(每一次迭代都会使误差的数量级乘方),正常情况下速度会比二次收敛慢,但是依然比梯度下降法快。
牛顿法的一般化:

H is the Hessian matrix(黑塞矩阵) 
牛顿法的缺点是,当特征数量过大的时候,求黑塞矩阵的逆会耗费相当长的时间。
2.指数簇
指数簇的一般形式

 -自然参数(natural parameter)
-自然参数(natural parameter)
 - 充分统计量(sufficient statistic) 通常情况下(伯努利分布或者高斯分布):
- 充分统计量(sufficient statistic) 通常情况下(伯努利分布或者高斯分布): 
固定a,b,T, 改变的值, 会得到一组不同的概率分布。
伯努利分布和高斯分布都是指数分布簇的特例
对于伯努利分布









对于高斯分布
考虑到方差对最终结果没有影响, 在这里设置




指数分布族还包括很多其他的分布:
多项式分布(multinomial)
泊松分布(poisson):用于计数的建模
伽马分布(gamma),指数分布(exponential):用于对连续非负的随机变量进行建模
β分布,Dirichlet分布:对小数建模
3.广义线性模型(GLMS)
为了导出广义线性模型,首先制定三个假设:
(1) 
(2) Given  , goal is to output
, goal is to output 
want 
(3)  即自然参数与特征向量之间是线性相关的
即自然参数与特征向量之间是线性相关的
对于伯努利分布


在上节的指数簇中推导出
而根据假设(3) 
我们的目标是输出 
由上节知

而



该函数即为logistic 函数
对于高斯分布
在最小二乘估计中,我们假设响应变量是连续的,且服从高斯分布 
我们的目标是输出
由上节知



顺带一提
正则响应函数(canonical response function):
正则链接函数(canonical link function):
4.Softmax回归(多类分类问题)
多项式分布 


这k个参数是冗余的,所以 我们定义 
在后面的过程中,我们将不使用  这个参数
这个参数
多项式分布属于指数分布簇,但是 
在这里按照如下定义

 ...
... 

都是k-1维的向量
引入指示函数 ,
, 
用  表示向量
表示向量 的第
的第 个元素,则
个元素,则 



where 


反过来,




为了减少参数冗余,定义

由GLMS的假设3: 
所以我们可以得到需要的假设



这种方法是logistic回归的推广,应用于多分类问题。
优化目标依然是极大似然估计

其中
使用梯度上升法或者牛顿法解得最优参数
第四讲完。
标签:ural 不同 poi 最优 9.png hle 估计 计数 tin
原文地址:http://www.cnblogs.com/madrabbit/p/6912843.html
{kind=link}