标签:style blog http color os 使用 java io strong
1.指针和数组的区别;
数组要么在静态存储区被创建(如全局数组),要么在栈上被创建。数组名对应着(而不是指向)一块内存,其地址与容量在生命期内保持不变,只有数组的内容可以改变。
指针可以随时指向任意类型的内存块,它的特征是“可变”,所以我们常用指针来操作动态内存。指针远比数组灵活,但也更危险。
(1)修改内容
示例1中,字符数组a的容量是6个字符,其内容为hello\0。a的内容可以改变,如a[0]= ‘X’。指针p指向常量字符串“world”(位于静态存储区,内容为world\0),常量字符串的内容是不可以被修改的。从语法上看,编译器并不觉得语句p[0]= ‘X’有什么不妥,但是该语句企图修改常量字符串的内容而导致运行错误。
|
char a[] = “hello”; a[0] = ‘X’; cout << a << endl; char *p = “world”; // 注意p指向常量字符串 p[0] = ‘X’; // 编译器不能发现该错误 cout << p << endl; |
示例1 修改数组和指针的内容
(2)内容复制与比较
不能对数组名进行直接复制与比较。示例2中,若想把数组a的内容复制给数组b,不能用语句 b = a ,否则将产生编译错误。应该用标准库函数strcpy进行复制。同理,比较b和a的内容是否相同,不能用if(b==a) 来判断,应该用标准库函数strcmp进行比较。
语句p = a 并不能把a的内容复制指针p,而是把a的地址赋给了p。要想复制a的内容,可以先用库函数malloc为p申请一块容量为strlen(a)+1个字符的内存,再用strcpy进行字符串复制。同理,语句if(p==a) 比较的不是内容而是地址,应该用库函数strcmp来比较。
|
// 数组… char a[] = "hello"; char b[10]; strcpy(b, a); // 不能用 b = a; if(strcmp(b, a) == 0) // 不能用 if (b == a) … |
|
// 指针… int len = strlen(a); char *p = (char *)malloc(sizeof(char)*(len+1)); strcpy(p,a); // 不要用 p = a; if(strcmp(p, a) == 0) // 不要用 if (p == a) … |
示例2 数组和指针的内容复制与比较
(3)计算内存容量
用运算符sizeof可以计算出数组的容量(字节数)。示例3(a)中,sizeof(a)的值是12(注意别忘了’\0’)。指针p指向a,但是sizeof(p)的值却是4。这是因为sizeof(p)得到的是一个指针变量的字节数,相当于sizeof(char*),而不是p所指的内存容量。C++/C语言没有办法知道指针所指的内存容量,除非在申请内存时记住它。
注意当数组作为函数的参数进行传递时,该数组自动退化为同类型的指针。示例3(b)中,不论数组a的容量是多少,sizeof(a)始终等于sizeof(char *)。
|
char a[] = "hello world"; char *p = a; cout<< sizeof(a) << endl; // 12字节 cout<< sizeof(p) << endl; // 4字节 |
示例3(a) 计算数组和指针的内存容量
|
void Func(char a[100]) { cout<< sizeof(a) << endl; // 4字节而不是100字节 } |
ps:感谢 http://blog.chinaunix.net/uid-23544029-id-311366.html
2.链表和数组的区别以及分别适用于什么情况;
数组是线性结构,可以直接索引,即要去第i个元素,a[i]即可。链表也是线性结构,要取第i个元素,只需用指针往后遍历i次就可。貌似链表比数组还要麻烦些,而且效率低些。
想到这些相同处中的一些细微的不同处,于是他们的真正不同处渐渐显现了:链表的效率为何比数组低些?先从两者的初始化开始。数组无需初始化,因为数组的元素在内存的栈区,系统自动申请空间。而链表的结点元素在内存的堆区,每个元素须手动申请空间,如malloc。也就是说数组是静态分配内存,而链表是动态分配内存。链表如此麻烦为何还要用链表呢?数组不能完全代替链表吗?回到这个问题只需想想我们当初是怎么完成学生信息管理系统的。为何那时候要用链表?因为学生管理系统中的插入,删除等操作都很灵活,而数组则大小固定,也无法灵活高效的插入,删除。因为堆操作灵活性更强。数组每次插入一个元素就需要移动已有元素,而链表元素在堆上,无需这么麻烦。
说了这么多,数组和链表的区别整理如下:
数组静态分配内存,链表动态分配内存;
数组在内存中连续,链表不连续;
数组元素在栈区,链表元素在堆区;
数组利用下标定位,时间复杂度为O(1),链表定位元素时间复杂度O(n);
数组插入或删除元素的时间复杂度O(n),链表的时间复杂度O(1)。
ps:http://blog.csdn.net/kunikida/article/details/7657501
3.static关键字在C,JAVA,C#中的作用;
C#
static是静态的意思,public或private与其他成员一样访问static成员,只能用类而不是实例化的对象;
static方法只能访问static属性;
static成员可以保留其值。
java中的static用来修饰类的成员函数,或者是成员变量,这样这些变量就成为了静态方法(类方法)和静态变量(类变量)
比如有类A中定义了静态变量varsample,静态方法funcSample();那么我们就可以这么调用他们A.varsample,A.funcSample(), 创建一个A类的实例 A a = new a(),a.varsample(可以,但不推荐)a.funcSample()(不可以)此外静态方法有一些限制:1.只能调用静态方法,使用静态变量 2.不能调用this或者super ;static变量存放在常量和静态变量区,在编译时分配内存。
C
c中的static也可以用来修饰变量和函数,称之为静态变量(内部变量)和静态函数(内部函数)
c中的静态变量中静态标示的是变量的作用域。这里静态变量根据声明的位置不同,可以分为全局静态变量和局部静态变量:其中全局静态变量的作用域为定义开始到文件结束。局部静态变量的作用域为定义开始到函数或者语句块结束处。但是全局静态变量和局部静态变量都是存储在全局数据区的,只有当程序结束时才会释放。静态函数中的静态也是指作用域,他的作用域是声明开始到文件结束。
4.抽象类和接口的区别;
(1)抽象类里面可以有非抽象方法但接口里只能有抽象方法
声明方法的存在而不去实现它的类被叫做抽像类(abstract class),它用于要创建一个体现某些基本行为的类,并为该类声明方法,但不能在该类中实现该类的情况。不能创建abstract 类的实例。然而可以创建一个变量,其类型是一个抽像类,并让它指向具体子类的一个实例。不能有抽像构造函数或抽像静态方法。Abstract 类的子类为它们父类中的所有抽像方法提供实现,否则它们也是抽像类为。取而代之,在子类中实现该方法。知道其行为的其它类可以在类中实现这些方法。
(2)接口(interface)是抽像类的变体。
在接口中,所有方法都是抽像的。多继承性可通过实现这样的接口而获得。接口中的所有方法都是抽像的,没有一个有程序体。接口只可以定义static final成员变量。接口的实现与子类相似,除了该实现类不能从接口定义中继承行为。当类实现特殊接口时,它定义(即将程序体给予)所有这种接口的方法。然后,它可以在实现了该接口的类的任何对像上调用接口的方法。由于有抽像类,它允许使用接口名作为引用变量的类型。通常的动态联编将生效。引用可以转换到接口类型或从接口类型转换,instanceof 运算符可以用来决定某对象的类是否实现了接口
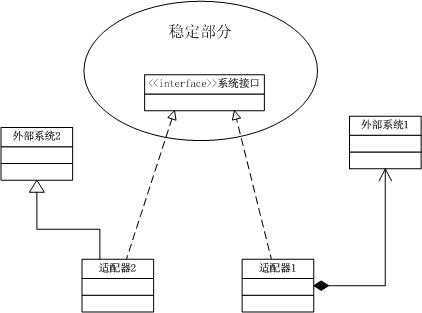
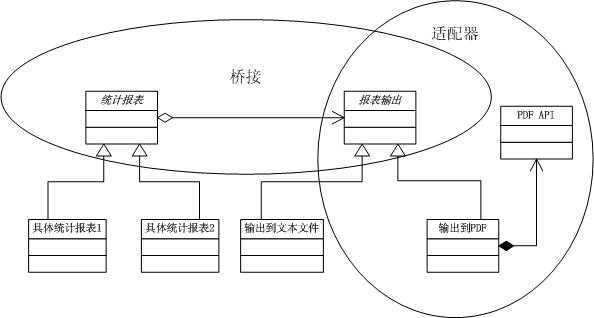
5.适配器和桥接模式的应用场景和区别;
共同点:桥接和适配器都是让两个东西配合工作
不同点:出发点不同。
适配器:改变已有的两个接口,让他们相容。
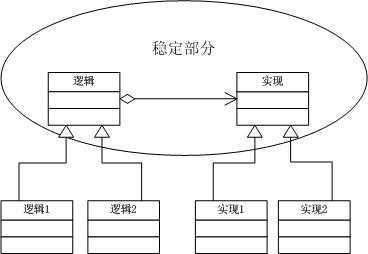
桥接模式:分离抽象化和实现,使两者的接口可以不同,目的是分离
5.1.适配器模式与桥接模式的区别和联系
适配器模式和桥接模式都是间接引用对象,因此可以使系统更灵活,在实现上都涉及从自身以外的一个接口向被引用的对象发出请求。
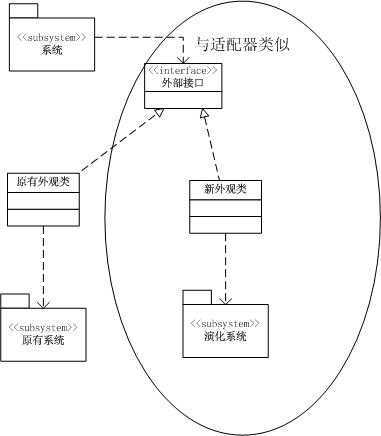
两种模式的区别在于使用场合的不同,适配器模式主要解决两个已经有接口间的匹配问题,这种情况下被适配的接口的实现往往是一个黑匣子。我们不想,也不能修改这个接口及其实现。同时也不可能控制其演化,只要相关的对象能与系统定义的接口协同工作即可。适配器模式经常被用在与第三方产品的功能集成上,采用该模式适应新类型的增加的方式是开发针对这个类型的适配器,如下图所示:
6.快速排序在什么情况下其时间复杂度是O(n2),并举例说明;
C++ 语言版本
#include<iostream>usingnamespacestd;voidQsort(inta[],intlow,inthigh){if(low>=high){return;}intfirst=low;intlast=high;intkey=a[first];/*用字表的第一个记录作为枢轴*/while(first<last){while(first<last&&a[last]>=key)--last;a[first]=a[last];/*将比第一个小的移到低端*/while(first<last&&a[first]<=key)++first;a[last]=a[first];/*将比第一个大的移到高端*/}a[first]=key;/*枢轴记录到位*/Qsort(a,low,first-1);Qsort(a,last+1,high);}intmain(){inta[]={57,68,59,52,72,28,96,33,24};Qsort(a,0,sizeof(a)/sizeof(a[0])-1);/*这里原文第三个参数要减1否则内存泄露*/for(inti=0;i<sizeof(a)/sizeof(a[0]);i++){cout<<a[i]<<"";}return(0);}/*参考数据结构p274(清华大学出版社,严蔚敏)*/ |
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
|
voidQuickSort(inta[],intnumsize)/*a是整形数组,numsize是元素个数*/{inti=0,j=numsize-1;intval=a[0];/*指定参考值val大小*/if(numsize>1)/*确保数组长度至少为2,否则无需排序*/{while(i<j)/*循环结束条件*/{/*从后向前搜索比val小的元素,找到后填到a[i]中并跳出循环*/for(;j>i;j--)if(a[j]<val){a[i]=a[j];break;}/*从前往后搜索比val大的元素,找到后填到a[j]中并跳出循环*/for(;i<j;i++)if(a[i]>val){a[j]=a[i];break;}}a[i]=val;/*将保存在val中的数放到a[i]中*/QuickSort(a,i);/*递归,对前i个数排序*/QuickSort(a+i+1,numsize-1-i);/*对i+1到numsize-1这numsize-1-i个数排序*/}} |
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
|
classQuick{publicvoidsort(intarr[],intlow,inthigh){intl=low;inth=high;intpovit=arr[low];while(l<h){while(l<h&&arr[h]>=povit)h--;if(l<h){inttemp=arr[h];arr[h]=arr[l];arr[l]=temp;l++;}while(l<h&&arr[l]<=povit)l++;if(l<h){inttemp=arr[h];arr[h]=arr[l];arr[l]=temp;h--;}}print(arr);System.out.print("l="+(l+1)+"h="+(h+1)+"povit="+povit+"\n");if(l>low)sort(arr,low,h-1);if(h<high)sort(arr,l+1,high);}}/*//////////////////////////方式二////////////////////////////////*/更效率点的代码:public<TextendsComparable<?superT>>T[]quickSort(T[]targetArr,intstart,intend){inti=start+1,j=end;Tkey=targetArr[start];SortUtil<T>sUtil=newSortUtil<T>();if(start>=end)return(targetArr);/*从i++和j--两个方向搜索不满足条件的值并交换**条件为:i++方向小于key,j--方向大于key*/while(true){while(targetArr[j].compareTo(key)>0)j--;while(targetArr[i].compareTo(key)<0&&i<j)i++;if(i>=j)break;sUtil.swap(targetArr,i,j);if(targetArr[i]==key){j--;}else{i++;}}/*关键数据放到‘中间’*/sUtil.swap(targetArr,start,j);if(start<i-1){this.quickSort(targetArr,start,i-1);}if(j+1<end){this.quickSort(targetArr,j+1,end);}returntargetArr;}/*//////////////方式三:减少交换次数,提高效率/////////////////////*/private<TextendsComparable<?superT>>voidquickSort(T[]targetArr,intstart,intend){inti=start,j=end;Tkey=targetArr[start];while(i<j){/*按j--方向遍历目标数组,直到比key小的值为止*/while(j>i&&targetArr[j].compareTo(key)>=0){j--;}if(i<j){/*targetArr[i]已经保存在key中,可将后面的数填入*/targetArr[i]=targetArr[j];}/*按i++方向遍历目标数组,直到比key大的值为止*/while(i<j&&targetArr[i].compareTo(key)<=0)/*此处一定要小于等于零,假设数组之内有一亿个1,0交替出现的话,而key的值又恰巧是1的话,那么这个小于等于的作用就会使下面的if语句少执行一亿次。*/{i++;}if(i<j){/*targetArr[j]已保存在targetArr[i]中,可将前面的值填入*/targetArr[j]=targetArr[i];}}/*此时i==j*/targetArr[i]=key;if(i-start>1){/*递归调用,把key前面的完成排序*/this.quickSort(targetArr,start,i-1);}if(end-j>1){/*递归调用,把key后面的完成排序*/this.quickSort(targetArr,j+1,end);}} |
7.JAVA和C#中的垃圾回收机制;
(一)垃圾回收器的基本假定
(1)最近被分配内存空间的对象最有可能需要被释放。在方法被执行前,通常需要为该方法所使用到的对象分配内存空间,搜索最近被分配的对象集合有助于花费最少的工作来释放进可能多的空闲内存空间。
(2)生命期最长的对象需要释放的可能性最小。在通过几轮垃圾回收后仍然存在的对象不大可能是那种能够在下一轮回收中被释放的临时对象,搜索这些内存块往往要进行大量的工作,却只能释放很小一部分的内存空间。
(3)同时分配内存的对象通常也会同时使用。将同时分配内存的对象存储位置彼此相连有助于提高缓存性能。
(二)几种垃圾回收机制
(1)标记-清除收集器 这种收集器首先遍历对象图并标记可到达的对象,然后扫描堆栈以寻找未标记对象并释放它们的内存。这种收集器一般使用单线程工作并停止其他操作。
(2)标记-压缩收集器 有时也叫标记-清除-压缩收集器,与标记-清除收集器有相同的标记阶段。在第二阶段,则把标记对象复制到堆栈的新域中以便压缩堆栈。这种收集器也停止其他操作。
(3)复制收集器 这种收集器将堆栈分为两个域,常称为半空间。每次仅使用一半的空间,jvm生成的新对象则放在另一半空间中。gc运行时,它把可到达对象复制到另一半空间,从而压缩了堆栈。这种方法适用于短生存期的对象,持续复制长生存期的对象则导致效率降低。
(4)增量收集器 增量收集器把堆栈分为多个域,每次仅从一个域收集垃圾。这会造成较小的应用程序中断。
(5)分代收集器 这种收集器把堆栈分为两个或多个域,用以存放不同寿命的对象。jvm生成的新对象一般放在其中的某个域中。过一段时间,继续存在的对象将获得使用期并转入更长寿命的域中。分代收集器对不同的域使用不同的算法以优化性能。
(6)并发收集器 并发收集器与应用程序同时运行。这些收集器在某点上(比如压缩时)一般都不得不停止其他操作以完成特定的任务,但是因为其他应用程序可进行其他的后台操作,所以中断其他处理的实际时间大大降低。
(7)并行收集器 并行收集器使用某种传统的算法并使用多线程并行的执行它们的工作。在多cpu机器上使用多线程技术可以显著的提高java应用程序的可扩展性。
(三).NET框架垃圾回收机制 .NET框架包含一个托管堆,所有的.NET语言在分配引用类型对象时都要使用它。像值类型这样的轻量级对象始终分配在栈中,但是所有的类实例和数组都被生成在一个内存池中,这个内存池就是托管堆。 .NET框架中的垃圾回收器被称为分代的垃圾回收器(Generational Garbage Collector),也就是说被分配的对象划分为3个类别,或称为“代”。分别为0,1,2。0、1、2代对应的托管堆的初始化大小分别是256K,2M和10M。垃圾回收器在发现改变大小能够提高性能的话,会改变托管堆的大小。例如当应用程序初始化了许多小的对象,并且这些对象会被很快回收的话,垃圾回收器就会将第0代的托管堆变为128K,并且提高回收的频率。如果情况相反,垃圾回收器发现在第0代的托管堆中不能回收很多空间时,就会增加托管堆的大小。在应用程序初始化的之前,所有等级的托管堆都是空的。当对象被初始化的时候,他们会按照初始化的先后顺序被放入第0代的托管堆中。
最近被分配内存空间的对象被放置于第0代,因为第0代很小,小到足以放进处理器的二级(L2)缓存,所以第0代能够为我们提供对其中对象的快速存取。经过一轮垃圾回收后,仍然保留在第0代中的对象被移进第1代中,再经过一轮垃圾内存回收后,仍然保留在第1代中的对象则被移进第2代中。第2代包含了生存期较长的对象,这些对象至少经过了两轮回收。 C#程序为一个对象分配内存时,托管堆几乎可以立即返回新对象所需的内存,托管堆之所以能有这样高效的内存分配性能是由于托管堆较为简单的数据结构。托管堆类似于简单的字节数组,有一个指向第一个可用内存空间的指针。 在某块被某对象所请求时,上述指针值就会返回给调用函数,而指针会重新调整至指向下一个可用的内存空间。分配一个托管内存块只比递增一个指针的值稍微复杂一点。这也是托管堆所优化的性能之一。在一个不需太多垃圾回收的应用程序中,托管堆的表现会优于传统的堆。 由于这个线性的内存分配方法的存在,在C#应用程序中同时分配的对象在托管堆上通常会被分配成彼此相邻。着安排和传统的堆内存分配完全不同,传统的堆内存分配是基于内存块大小的。例如,两个同时分配的对象在堆上的位置可能相距很远,从而降低了缓存的性能。因此虽然内存分配很快,但在一些比较重要的程序中,第0代中的可用内存很有可能会彻底被消耗光。记住,第0代小到可以装进L2缓冲区,并且没有被使用的内存不会被自动释放。当第0代中没有可以分配的有效内存时,就会在第0代中触发一轮垃圾回收,在这轮垃圾回收中将删除所有不再被引用的对象,并将当前正在使用中的对象移至第1代。针对第0代的垃圾回收是最常见的回收类型,而且速度很快。在第0代的垃圾内存回收不能有效的请求到充足的内存时,就启动第1代的垃圾内存回收。第2代的垃圾内存回收要作为最后一种手段而使用,当且仅当第1代和第0代的垃圾内存回收不能被提供足够内存时进行。如果各代都进行了垃圾回收后仍没有可用的内存,就会引发一个OutOfMemeryException异常 。
(四)Java垃圾回收机制 执行Java程序时内存如何放置?《Java编程思想》一书中提到了六个地方: (1)寄存器(Register) (2)栈(Stack) (3)堆(Heap):用来置放所有Java对象 (4)静态存储空间(Static storage):用来存放“程序执行期间”一直存在的数据。用statci修饰。 (5)常量存储空间(Constant storage) (6)Non-RAM存储空间:我理解为磁盘存储区,即非内存区域。 Sun HotSpot 1.4.1使用分代收集器,它把堆分为三个主要的域:新域、旧域以及永久域。Jvm生成的所有新对象放在新域中。一旦对象经历了一定数量的垃圾收集循环后,便获得使用期并进入旧域。在永久域中jvm则存储class和method对象。就配置而言,永久域是一个独立域并且不认为是堆的一部分。这样看来,采用了HotSpot引擎技术的JVM应该采用了和.NET框架类似的垃圾回收机制-----分代垃圾回收方法。 下面介绍如何控制这些域的大小。可使用-Xms和-Xmx 控制整个堆的原始大小或最大值。
下面的命令是把初始大小设置为128M: java –Xms128m
–Xmx256m为控制新域的大小,可使用-XX:NewRatio设置新域在堆中所占的比例。
下面的命令把整个堆设置成128m,新域比率设置成3,即新域与旧域比例为1:3,新域为堆的1/4或32M: java –Xms128m –Xmx128m –XX:NewRatio =3可使用-XX:NewSize和-XX:MaxNewsize设置新域的初始值和最大值。
下面的命令把新域的初始值和最大值设置成64m: java –Xms256m –Xmx256m –Xmn64m
永久域默认大小为4m。运行程序时,jvm会调整永久域的大小以满足需要。每次调整时,jvm会对堆进行一次完全的垃圾收集。
使用-XX:MaxPerSize标志来增加永久域搭大小。在WebLogic Server应用程序加载较多类时,经常需要增加永久域的最大值。当jvm加载类时,永久域中的对象急剧增加,从而使jvm不断调整永久域大小。为了避免调整,可使用-XX:PerSize标志设置初始值。
下面把永久域初始值设置成32m,最大值设置成64m。 java -Xms512m -Xmx512m -Xmn128m -XX:PermSize=32m -XX:MaxPermSize=64m 默认状态下,HotSpot在新域中使用复制收集器。该域一般分为三个部分。第一部分为Eden,用于生成新的对象。另两部分称为救助空间,当Eden充满时,收集器停止应用程序,把所有可到达对象复制到当前的from救助空间,一旦当前的from救助空间充满,收集器则把可到达对象复制到当前的to救助空间。From和to救助空间互换角色。维持活动的对象将在救助空间不断复制,直到它们获得使用期并转入旧域。使用-XX:SurvivorRatio可控制新域子空间的大小。 同NewRation一样,SurvivorRation规定某救助域与Eden空间的比值。比如,以下命令把新域设置成64m,Eden占32m,每个救助域各占16m: java -Xms256m -Xmx256m -Xmn64m -XX:SurvivorRation =2
如前所述,默认状态下HotSpot对新域使用复制收集器,对旧域使用标记-清除-压缩收集器。在新域中使用复制收集器有很多意义,因为应用程序生成的大部分对象是短寿命的。理想状态下,所有过渡对象在移出Eden空间时将被收集。如果能够这样的话,并且移出Eden空间的对象是长寿命的,那么理论上可以立即把它们移进旧域,避免在救助空间反复复制。但是,应用程序不能适合这种理想状态,因为它们有一小部分中长寿命的对象。最好是保持这些中长寿命的对象并放在新域中,因为复制小部分的对象总比压缩旧域廉价。为控制新域中对象的复制,可用-XX:TargetSurvivorRatio控制救助空间的比例(该值是设置救助空间的使用比例。如救助空间位1M,该值50表示可用500K)。该值是一个百分比,默认值是50。当较大的堆栈使用较低的sruvivorratio时,应增加该值到80至90,以更好利用救助空间。用-XX:maxtenuring threshold可控制上限。
为放置所有的复制全部发生以及希望对象从eden扩展到旧域,可以把MaxTenuring Threshold设置成0。设置完成后,实际上就不再使用救助空间了,因此应把SurvivorRatio设成最大值以最大化Eden空间,设置如下: java … -XX:MaxTenuringThreshold=0 –XX:SurvivorRatio=50000 … 后记:正如《Java本纪之Java虚拟机的10年》所提到的那样“最近的五年,就是(JVM)继续优化的五年。继续进行优化的方法有几条路,一是研究新的采样算法。因为采样关系到不同的优化策略,会对整体性能有比较大的影响。二是研究深度优化的方法。三是研究垃圾收集的算法。垃圾收集会带来程序短暂的停顿,这会带来负面的用户体验。于是,如何提高垃圾收集的效率,减少延迟,出现了五花八门的算法,比如渐进式收集、火车算法等。”提高语言的执行速度和效率一直是设计开发者所追求的目标,因此垃圾回收的算法也会随日月的递增而发展。我想也没有哪个面试官敢轻易问你谈谈C#或者Java的垃圾回收机制(至少我还没碰到过),很多问题一旦讨论的深入,足以写成长篇大著。但刨根问底、追根溯源真的是一件很美的事情,孔子登东山而小鲁,登泰山而小天下。
参考文献: 《Java编程思想》第2版 《Visual C#.NET技术内幕》 《Java本纪之Java虚拟机的10年》 《深入理解.NET内存回收机制》 《深入.NET托管堆(managedheap)
8.K-Mean原理;
k-means 算法接受参数 k
;然后将事先输入的n个数据对象划分为
k个聚类以便使得所获得的聚类满足:同一聚类中的对象相似度较高;而不同聚类中的对象相似度较小。聚类相似度是利用各聚类中对象的均值所获得一个“中心对
象”(引力中心)来进行计算的。
K-means算法是最为经典的基于划分的聚类方法,是十大经典数据挖掘算法之一。K-means算法的基本思想是:以空间中k个点为中心进行聚类,对最靠近他们的对象归类。通过迭代的方法,逐次更新各聚类中心的值,直至得到最好的聚类结果。
假设要把样本集分为c个类别,算法描述如下:
(1)适当选择c个类的初始中心;
(2)在第k次迭代中,对任意一个样本,求其到c个中心的距离,将该样本归到距离最短的中心所在的类;
(3)利用均值等方法更新该类的中心值;
(4)对于所有的c个聚类中心,如果利用(2)(3)的迭代法更新后,值保持不变,则迭代结束,否则继续迭代。
该算法的最大优势在于简洁和快速。算法的关键在于初始中心的选择和距离公式。
9.决策树训练原理;
决策树是用二叉树形图来表示处理逻辑的一种工具。可以直观、清晰地表达加工的逻辑要求。特别适合于判断因素比较少、逻辑组合关系不复杂的情况。
决策树提供了一种展示类似在什么条件下会得到什么值这类规则的方法。比如,在贷款申请中,要对申请的风险大小做出判断,图是为了解决这个问题而建立的一棵决策树,从中我们可以看到决策树的基本组成部分:决策节点、分支和叶子。
决策树中最上面的节点称为根节点,是整个决策树的开始。本例中根节点是“收入>¥40,000”,对此问题的不同回答产生了“是”和“否”两个分支。
决策树的每个节点子节点的个数与决策树在用的算法有关。如CART算法得到的决策树每个节点有两个分支,这种树称为二叉树。允许节点含有多于两个子节点的树称为多叉树。
每个分支要么是一个新的决策节点,要么是树的结尾,称为叶子。在沿着决策树从上到下遍历的过程中,在每个节点都会遇到一个问题,对每个节点上问题的不同回答导致不同的分支,最后会到达一个叶子节点。这个过程就是利用决策树进行分类的过程,利用几个变量(每个变量对应一个问题)来判断所属的类别(最后每个叶子会对应一个类别)。
假如负责借贷的银行官员利用上面这棵决策树来决定支持哪些贷款和拒绝哪些贷款,那么他就可以用贷款申请表来运行这棵决策树,用决策树来判断风险的大小。“年收入>¥40,00”和“高负债”的用户被认为是“高风险”,同时“收入<¥40,000”但“工作时间>5年”的申请,则被认为“低风险”而建议贷款给他/她。
数据挖掘中决策树是一种经常要用到的技术,可以用于分析数据,同样也可以用来作预测(就像上面的银行官员用他来预测贷款风险)。常用的算法有CHAID、 CART、 Quest 和C5.0。
建立决策树的过程,即树的生长过程是不断的把数据进行切分的过程,每次切分对应一个问题,也对应着一个节点。对每个切分都要求分成的组之间的“差异”最大。
各种决策树算法之间的主要区别就是对这个“差异”衡量方式的区别。对具体衡量方式算法的讨论超出了本文的范围,在此我们只需要把切分看成是把一组数据分成几份,份与份之间尽量不同,而同一份内的数据尽量相同。这个切分的过程也可称为数据的“纯化”。看我们的例子,包含两个类别--低风险和高风险。如果经过一次切分后得到的分组,每个分组中的数据都属于同一个类别,显然达到这样效果的切分方法就是我们所追求的。
到现在为止我们所讨论的例子都是非常简单的,树也容易理解,当然实际中应用的决策树可能非常复杂。假定我们利用历史数据建立了一个包含几百个属性、输出的类有十几种的决策树,这样的一棵树对人来说可能太复杂了,但每一条从根结点到叶子节点的路径所描述的含义仍然是可以理解的。决策树的这种易理解性对数据挖掘的使用者来说是一个显著的优点。
然而决策树的这种明确性可能带来误导。比如,决策树每个节点对应分割的定义都是非常明确毫不含糊的,但在实际生活中这种明确可能带来麻烦(凭什么说年收入¥40,001的人具有较小的信用风险而¥40,000的人就没有)。
建立一颗决策树可能只要对数据库进行几遍扫描之后就能完成,这也意味着需要的计算资源较少,而且可以很容易的处理包含很多预测变量的情况,因此决策树模型可以建立得很快,并适合应用到大量的数据上。
对最终要拿给人看的决策树来说,在建立过程中让其生长的太“枝繁叶茂”是没有必要的,这样既降低了树的可理解性和可用性,同时也使决策树本身对历史数据的依赖性增大,也就是说这是这棵决策树对此历史数据可能非常准确,一旦应用到新的数据时准确性却急剧下降,我们称这种情况为训练过度。为了使得到的决策树所蕴含的规则具有普遍意义,必须防止训练过度,同时也减少了训练的时间。因此我们需要有一种方法能让我们在适当的时候停止树的生长。常用的方法是设定决策树的最大高度(层数)来限制树的生长。还有一种方法是设定每个节点必须包含的最少记录数,当节点中记录的个数小于这个数值时就停止分割。
与设置停止增长条件相对应的是在树建立好之后对其进行修剪。先允许树尽量生长,然后再把树修剪到较小的尺寸,当然在修剪的同时要求尽量保持决策树的准确度尽量不要下降太多。
对决策树常见的批评是说其在为一个节点选择怎样进行分割时使用“贪心”算法。此种算法在决定当前这个分割时根本不考虑此次选择会对将来的分割造成什么样的影响。换句话说,所有的分割都是顺序完成的,一个节点完成分割之后不可能以后再有机会回过头来再考察此次分割的合理性,每次分割都是依赖于他前面的分割方法,也就是说决策树中所有的分割都受根结点的第一次分割的影响,只要第一次分割有一点点不同,那么由此得到的整个决策树就会完全不同。那么是否在选择一个节点的分割的同时向后考虑两层甚至更多的方法,会具有更好的结果呢?目前我们知道的还不是很清楚,但至少这种方法使建立决策树的计算量成倍的增长,因此现在还没有哪个产品使用这种方法。
而且,通常的分割算法在决定怎么在一个节点进行分割时,都只考察一个预测变量,即节点用于分割的问题只与一个变量有关。这样生成的决策树在有些本应很明确的情况下可能变得复杂而且意义含混,为此目前新提出的一些算法开始在一个节点同时用多个变量来决定分割的方法。比如以前的决策树中可能只能出现类似“收入<¥35,000”的判断,现在则可以用“收入<(0.35*抵押)”或“收入>¥35,000或抵押<150,000”这样的问题。
决策树很擅长处理非数值型数据,这与神经网络只能处理数值型数据比起来,就免去了很多数据预处理工作。
甚至有些决策树算法专为处理非数值型数据而设计,因此当采用此种方法建立决策树同时又要处理数值型数据时,反而要做把数值型数据映射到非数值型数据的预处理。
10.SVM原理
(一)SVM的简介
支持向量机(Support Vector Machine)是Cortes和Vapnik于1995年首先提出的,它在解决小样本、非线性及高维模式识别中表现出许多特有的优势,并能够推广应用到函数拟合等其他机器学习问题中[10]。
支持向量机方法是建立在统计学习理论的VC 维理论和结构风险最小原理基础上的,根据有限的样本信息在模型的复杂性(即对特定训练样本的学习精度,Accuracy)和学习能力(即无错误地识别任意样本的能力)之间寻求最佳折衷,以期获得最好的推广能力[14](或称泛化能力)。
以上是经常被有关SVM 的学术文献引用的介绍,我来逐一分解并解释一下。
Vapnik是统计机器学习的大牛,这想必都不用说,他出版的《Statistical Learning Theory》是一本完整阐述统计机器学习思想的名著。在该书中详细的论证了统计机器学习之所以区别于传统机器学习的本质,就在于统计机器学习能够精确的给出学习效果,能够解答需要的样本数等等一系列问题。与统计机器学习的精密思维相比,传统的机器学习基本上属于摸着石头过河,用传统的机器学习方法构造分类系统完全成了一种技巧,一个人做的结果可能很好,另一个人差不多的方法做出来却很差,缺乏指导和原则。
所谓VC维是对函数类的一种度量,可以简单的理解为问题的复杂程度,VC维越高,一个问题就越复杂。正是因为SVM关注的是VC维,后面我们可以看到,SVM解决问题的时候,和样本的维数是无关的(甚至样本是上万维的都可以,这使得SVM很适合用来解决文本分类的问题,当然,有这样的能力也因为引入了核函数)。
结构风险最小听上去文绉绉,其实说的也无非是下面这回事。
机器学习本质上就是一种对问题真实模型的逼近(我们选择一个我们认为比较好的近似模型,这个近似模型就叫做一个假设),但毫无疑问,真实模型一定是不知道的(如果知道了,我们干吗还要机器学习?直接用真实模型解决问题不就可以了?对吧,哈哈)既然真实模型不知道,那么我们选择的假设与问题真实解之间究竟有多大差距,我们就没法得知。比如说我们认为宇宙诞生于150亿年前的一场大爆炸,这个假设能够描述很多我们观察到的现象,但它与真实的宇宙模型之间还相差多少?谁也说不清,因为我们压根就不知道真实的宇宙模型到底是什么。
这个与问题真实解之间的误差,就叫做风险(更严格的说,误差的累积叫做风险)。我们选择了一个假设之后(更直观点说,我们得到了一个分类器以后),真实误差无从得知,但我们可以用某些可以掌握的量来逼近它。最直观的想法就是使用分类器在样本数据上的分类的结果与真实结果(因为样本是已经标注过的数据,是准确的数据)之间的差值来表示。这个差值叫做经验风险Remp(w)。以前的机器学习方法都把经验风险最小化作为努力的目标,但后来发现很多分类函数能够在样本集上轻易达到100%的正确率,在真实分类时却一塌糊涂(即所谓的推广能力差,或泛化能力差)。此时的情况便是选择了一个足够复杂的分类函数(它的VC维很高),能够精确的记住每一个样本,但对样本之外的数据一律分类错误。回头看看经验风险最小化原则我们就会发现,此原则适用的大前提是经验风险要确实能够逼近真实风险才行(行话叫一致),但实际上能逼近么?答案是不能,因为样本数相对于现实世界要分类的文本数来说简直九牛一毛,经验风险最小化原则只在这占很小比例的样本上做到没有误差,当然不能保证在更大比例的真实文本上也没有误差。
统计学习因此而引入了泛化误差界的概念,就是指真实风险应该由两部分内容刻画,一是经验风险,代表了分类器在给定样本上的误差;二是置信风险,代表了我们在多大程度上可以信任分类器在未知文本上分类的结果。很显然,第二部分是没有办法精确计算的,因此只能给出一个估计的区间,也使得整个误差只能计算上界,而无法计算准确的值(所以叫做泛化误差界,而不叫泛化误差)。
置信风险与两个量有关,一是样本数量,显然给定的样本数量越大,我们的学习结果越有可能正确,此时置信风险越小;二是分类函数的VC维,显然VC维越大,推广能力越差,置信风险会变大。
泛化误差界的公式为:
R(w)≤Remp(w)+Ф(n/h)
公式中R(w)就是真实风险,Remp(w)就是经验风险,Ф(n/h)就是置信风险。统计学习的目标从经验风险最小化变为了寻求经验风险与置信风险的和最小,即结构风险最小。
SVM正是这样一种努力最小化结构风险的算法。
SVM其他的特点就比较容易理解了。
小样本,并不是说样本的绝对数量少(实际上,对任何算法来说,更多的样本几乎总是能带来更好的效果),而是说与问题的复杂度比起来,SVM算法要求的样本数是相对比较少的。
非线性,是指SVM擅长应付样本数据线性不可分的情况,主要通过松弛变量(也有人叫惩罚变量)和核函数技术来实现,这一部分是SVM的精髓,以后会详细讨论。多说一句,关于文本分类这个问题究竟是不是线性可分的,尚没有定论,因此不能简单的认为它是线性可分的而作简化处理,在水落石出之前,只好先当它是线性不可分的(反正线性可分也不过是线性不可分的一种特例而已,我们向来不怕方法过于通用)。
高维模式识别是指样本维数很高,例如文本的向量表示,如果没有经过另一系列文章(《文本分类入门》)中提到过的降维处理,出现几万维的情况很正常,其他算法基本就没有能力应付了,SVM却可以,主要是因为SVM 产生的分类器很简洁,用到的样本信息很少(仅仅用到那些称之为“支持向量”的样本,此为后话),使得即使样本维数很高,也不会给存储和计算带来大麻烦(相对照而言,kNN算法在分类时就要用到所有样本,样本数巨大,每个样本维数再一高,这日子就没法过了……)。
下一节开始正式讨论SVM。别嫌我说得太详细哦。
SVM入门(二)线性分类器Part 1
线性分类器(一定意义上,也可以叫做感知机) 是最简单也很有效的分类器形式.在一个线性分类器中,可以看到SVM形成的思路,并接触很多SVM的核心概念.
用一个二维空间里仅有两类样本的分类问题来举个小例子。如图所示

C1和C2是要区分的两个类别,在二维平面中它们的样本如上图所示。中间的直线就是一个分类函数,它可以将两类样本完全分开。一般的,如果一个线性函数能够将样本完全正确的分开,就称这些数据是线性可分的,否则称为非线性可分的。
什么叫线性函数呢?在一维空间里就是一个点,在二维空间里就是一条直线,三维空间里就是一个平面,可以如此想象下去,如果不关注空间的维数,这种线性函数还有一个统一的名称——超平面(Hyper Plane)!
实际上,一个线性函数是一个实值函数(即函数的值是连续的实数),而我们的分类问题(例如这里的二元分类问题——回答一个样本属于还是不属于一个类别的问题)需要离散的输出值,例如用1表示某个样本属于类别C1,而用0表示不属于(不属于C1也就意味着属于C2),这时候只需要简单的在实值函数的基础上附加一个阈值即可,通过分类函数执行时得到的值大于还是小于这个阈值来确定类别归属。 例如我们有一个线性函数
g(x)=wx+b
【看到好多人都在问g(x)=0 和 g(x)的问题,我在这里帮楼主补充一下:g(x)实际是以w为法向量的一簇超平面,在二维空间表示为一簇直线(就是一簇平行线,他们的法向量都是w),而g(x)=0只是这么多平行线中的一条。】
我们可以取阈值为0,这样当有一个样本xi需要判别的时候,我们就看g(xi)的值。若g(xi)>0,就判别为类别C1,若g(xi)<0,则判别为类别C2(等于的时候我们就拒绝判断,呵呵)。此时也等价于给函数g(x)附加一个符号函数sgn(),即f(x)=sgn [g(x)]是我们真正的判别函数。
关于g(x)=wx+b这个表达式要注意三点:一,式中的x不是二维坐标系中的横轴,而是样本的向量表示,例如一个样本点的坐标是(3,8),则xT=(3,8) ,而不是x=3(一般说向量都是说列向量,因此以行向量形式来表示时,就加上转置)。二,这个形式并不局限于二维的情况,在n维空间中仍然可以使用这个表达式,只是式中的w成为了n维向量(在二维的这个例子中,w是二维向量,为了表示起来方便简洁,以下均不区别列向量和它的转置,聪明的读者一看便知);三,g(x)不是中间那条直线的表达式,中间那条直线的表达式是g(x)=0,即wx+b=0,我们也把这个函数叫做分类面。
实际上很容易看出来,中间那条分界线并不是唯一的,我们把它稍微旋转一下,只要不把两类数据分错,仍然可以达到上面说的效果,稍微平移一下,也可以。此时就牵涉到一个问题,对同一个问题存在多个分类函数的时候,哪一个函数更好呢?显然必须要先找一个指标来量化“好”的程度,通常使用的都是叫做“分类间隔”的指标。下一节我们就仔细说说分类间隔,也补一补相关的数学知识。
SVM入门(三)线性分类器Part 2
上回说到对于文本分类这样的不适定问题(有一个以上解的问题称为不适定问题),需要有一个指标来衡量解决方案(即我们通过训练建立的分类模型)的好坏,而分类间隔是一个比较好的指标。
在进行文本分类的时候,我们可以让计算机这样来看待我们提供给它的训练样本,每一个样本由一个向量(就是那些文本特征所组成的向量)和一个标记(标示出这个样本属于哪个类别)组成。如下:
Di=(xi,yi)
xi就是文本向量(维数很高),yi就是分类标记。
在二元的线性分类中,这个表示分类的标记只有两个值,1和-1(用来表示属于还是不属于这个类)。有了这种表示法,我们就可以定义一个样本点到某个超平面的间隔:
δi=yi(wxi+b)
这个公式乍一看没什么神秘的,也说不出什么道理,只是个定义而已,但我们做做变换,就能看出一些有意思的东西。
首先注意到如果某个样本属于该类别的话,那么wxi+b>0(记得么?这是因为我们所选的g(x)=wx+b就通过大于0还是小于0来判断分类),而yi也大于0;若不属于该类别的话,那么wxi+b<0,而yi也小于0,这意味着yi(wxi+b)总是大于0的,而且它的值就等于|wxi+b|!(也就是|g(xi)|)
现在把w和b进行一下归一化,即用w/||w||和b/||w||分别代替原来的w和b,那么间隔就可以写成
![]()
【点到直线的距离,做解析几何中为:
D = (Ax + By + c) /sqrt(A^2+B^2)
sqrt(A^2+B^2)就相当于||W||, 其中向量W=[A, B];
(Ax + By + c)就相当于g(X), 其中向量X=[x,y]。】
这个公式是不是看上去有点眼熟?没错,这不就是解析几何中点xi到直线g(x)=0的距离公式嘛!(推广一下,是到超平面g(x)=0的距离, g(x)=0就是上节中提到的分类超平面)
小Tips:||w||是什么符号?||w||叫做向量w的范数,范数是对向量长度的一种度量。我们常说的向量长度其实指的是它的2-范数,范数最一般的表示形式为p-范数,可以写成如下表达式
向量w=(w1, w2, w3,…… wn)
它的p-范数为
![]()
看看把p换成2的时候,不就是传统的向量长度么?当我们不指明p的时候,就像||w||这样使用时,就意味着我们不关心p的值,用几范数都可以;或者上文已经提到了p的值,为了叙述方便不再重复指明。
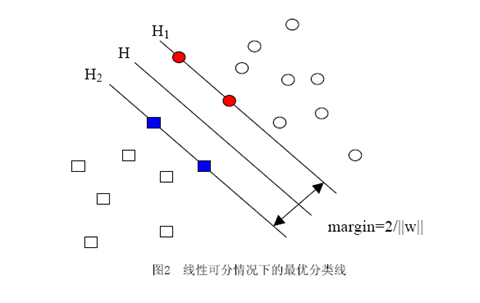
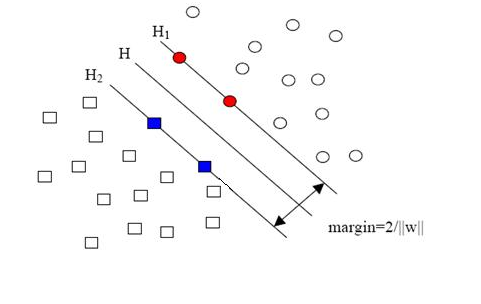
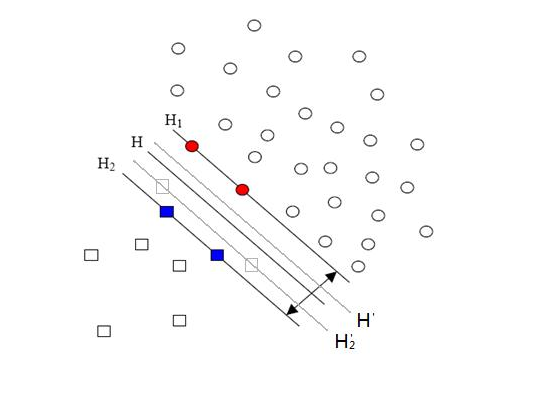
当用归一化的w和b代替原值之后的间隔有一个专门的名称,叫做几何间隔,几何间隔所表示的正是点到超平面的欧氏距离,我们下面就简称几何间隔为“距离”。以上是单个点到某个超平面的距离(就是间隔,后面不再区别这两个词)定义,同样可以定义一个点的集合(就是一组样本)到某个超平面的距离为此集合中离超平面最近的点的距离。下面这张图更加直观的展示出了几何间隔的现实含义:
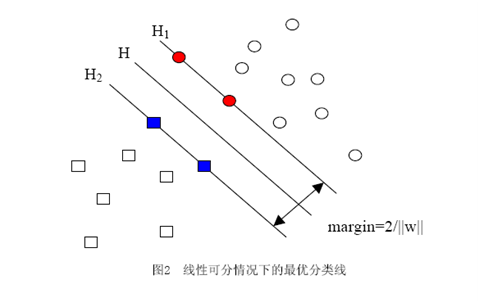
H是分类面,而H1和H2是平行于H,且过离H最近的两类样本的直线,H1与H,H2与H之间的距离就是几何间隔。
之所以如此关心几何间隔这个东西,是因为几何间隔与样本的误分次数间存在关系:
![]()
其中的δ是样本集合到分类面的间隔,R=max ||xi|| i=1,...,n,即R是所有样本中(xi是以向量表示的第i个样本)向量长度最长的值(也就是说代表样本的分布有多么广)。先不必追究误分次数的具体定义和推导过程,只要记得这个误分次数一定程度上代表分类器的误差。而从上式可以看出,误分次数的上界由几何间隔决定!(当然,是样本已知的时候)
至此我们就明白为何要选择几何间隔来作为评价一个解优劣的指标了,原来几何间隔越大的解,它的误差上界越小。因此最大化几何间隔成了我们训练阶段的目标,而且,与二把刀作者所写的不同,最大化分类间隔并不是SVM的专利,而是早在线性分类时期就已有的思想。
SVM入门(四)线性分类器的求解——问题的描述Part1
上节说到我们有了一个线性分类函数,也有了判断解优劣的标准——即有了优化的目标,这个目标就是最大化几何间隔,但是看过一些关于SVM的论文的人一定记得什么优化的目标是要最小化||w||这样的说法,这是怎么回事呢?回头再看看我们对间隔和几何间隔的定义:
间隔:δ=y(wx+b)=|g(x)|
几何间隔:![]()
可以看出δ=||w||δ几何。注意到几何间隔与||w||是成反比的,因此最大化几何间隔与最小化||w||完全是一回事。而我们常用的方法并不是固定||w||的大小而寻求最大几何间隔,而是固定间隔(例如固定为1),寻找最小的||w||。
而凡是求一个函数的最小值(或最大值)的问题都可以称为寻优问题(也叫作一个规划问题),又由于找最大值的问题总可以通过加一个负号变为找最小值的问题,因此我们下面讨论的时候都针对找最小值的过程来进行。一个寻优问题最重要的部分是目标函数,顾名思义,就是指寻优的目标。例如我们想寻找最小的||w||这件事,就可以用下面的式子表示:
![]()
但实际上对于这个目标,我们常常使用另一个完全等价的目标函数来代替,那就是:
![]() (式1)
(式1)
不难看出当||w||2达到最小时,||w||也达到最小,反之亦然(前提当然是||w||描述的是向量的长度,因而是非负的)。之所以采用这种形式,是因为后面的求解过程会对目标函数作一系列变换,而式(1)的形式会使变换后的形式更为简洁(正如聪明的读者所料,添加的系数二分之一和平方,皆是为求导数所需)。
接下来我们自然会问的就是,这个式子是否就描述了我们的问题呢?(回想一下,我们的问题是有一堆点,可以被分成两类,我们要找出最好的分类面)
如果直接来解这个求最小值问题,很容易看出当||w||=0的时候就得到了目标函数的最小值。但是你也会发现,无论你给什么样的数据,都是这个解!反映在图中,就是H1与H2两条直线间的距离无限大,这个时候,所有的样本点(无论正样本还是负样本)都跑到了H1和H2中间,而我们原本的意图是,H1右侧的被分为正类,H2 左侧的被分为负类,位于两类中间的样本则拒绝分类(拒绝分类的另一种理解是分给哪一类都有道理,因而分给哪一类也都没有道理)。这下可好,所有样本点都进入了无法分类的灰色地带。

造成这种结果的原因是在描述问题的时候只考虑了目标,而没有加入约束条件,约束条件就是在求解过程中必须满足的条件,体现在我们的问题中就是样本点必须在H1或H2的某一侧(或者至少在H1和H2上),而不能跑到两者中间。我们前文提到过把间隔固定为1,这是指把所有样本点中间隔最小的那一点的间隔定为1(这也是集合的间隔的定义,有点绕嘴),也就意味着集合中的其他点间隔都不会小于1,按照间隔的定义,满足这些条件就相当于让下面的式子总是成立:
yi[(w·xi)+b]≥1 (i=1,2,…,l) (l是总的样本数)
但我们常常习惯让式子的值和0比较,因而经常用变换过的形式:
yi[(w·xi)+b]-1≥0 (i=1,2,…,l) (l是总的样本数)
因此我们的两类分类问题也被我们转化成了它的数学形式,一个带约束的最小值的问题:

下一节我们从最一般的意义上看看一个求最小值的问题有何特征,以及如何来解。
SVM入门(五)线性分类器的求解——问题的描述Part2
从最一般的定义上说,一个求最小值的问题就是一个优化问题(也叫寻优问题,更文绉绉的叫法是规划——Programming),它同样由两部分组成,目标函数和约束条件,可以用下面的式子表示:
 (式1)
(式1)
约束条件用函数c来表示,就是constrain的意思啦。你可以看出一共有p+q个约束条件,其中p个是不等式约束,q个等式约束。
关于这个式子可以这样来理解:式中的x是自变量,但不限定它的维数必须为1(视乎你解决的问题空间维数,对我们的文本分类来说,那可是成千上万啊)。要求f(x)在哪一点上取得最小值(反倒不太关心这个最小值到底是多少,关键是哪一点),但不是在整个空间里找,而是在约束条件所划定的一个有限的空间里找,这个有限的空间就是优化理论里所说的可行域。注意可行域中的每一个点都要求满足所有p+q个条件,而不是满足其中一条或几条就可以(切记,要满足每个约束),同时可行域边界上的点有一个额外好的特性,它们可以使不等式约束取得等号!而边界内的点不行。
关于可行域还有个概念不得不提,那就是凸集,凸集是指有这么一个点的集合,其中任取两个点连一条直线,这条线上的点仍然在这个集合内部,因此说“凸”是很形象的(一个反例是,二维平面上,一个月牙形的区域就不是凸集,你随便就可以找到两个点违反了刚才的规定)。
回头再来看我们线性分类器问题的描述,可以看出更多的东西。
 (式2)
(式2)
在这个问题中,自变量就是w,而目标函数是w的二次函数,所有的约束条件都是w的线性函数(哎,千万不要把xi当成变量,它代表样本,是已知的),这种规划问题有个很有名气的称呼——二次规划(Quadratic Programming,QP),而且可以更进一步的说,由于它的可行域是一个凸集,因此它是一个凸二次规划。
一下子提了这么多术语,实在不是为了让大家以后能向别人炫耀学识的渊博,这其实是我们继续下去的一个重要前提,因为在动手求一个问题的解之前(好吧,我承认,是动计算机求……),我们必须先问自己:这个问题是不是有解?如果有解,是否能找到?
对于一般意义上的规划问题,两个问题的答案都是不一定,但凸二次规划让人喜欢的地方就在于,它有解(教科书里面为了严谨,常常加限定成分,说它有全局最优解,由于我们想找的本来就是全局最优的解,所以不加也罢),而且可以找到!(当然,依据你使用的算法不同,找到这个解的速度,行话叫收敛速度,会有所不同)
对比(式2)和(式1)还可以发现,我们的线性分类器问题只有不等式约束,因此形式上看似乎比一般意义上的规划问题要简单,但解起来却并非如此。
因为我们实际上并不知道该怎么解一个带约束的优化问题。如果你仔细回忆一下高等数学的知识,会记得我们可以轻松的解一个不带任何约束的优化问题(实际上就是当年背得烂熟的函数求极值嘛,求导再找0点呗,谁不会啊?笑),我们甚至还会解一个只带等式约束的优化问题,也是背得烂熟的,求条件极值,记得么,通过添加拉格朗日乘子,构造拉格朗日函数,来把这个问题转化为无约束的优化问题云云(如果你一时没想通,我提醒一下,构造出的拉格朗日函数就是转化之后的问题形式,它显然没有带任何条件)。
读者问:如果只带等式约束的问题可以转化为无约束的问题而得以求解,那么可不可以把带不等式约束的问题向只带等式约束的问题转化一下而得以求解呢?
聪明,可以,实际上我们也正是这么做的。下一节就来说说如何做这个转化,一旦转化完成,求解对任何学过高等数学的人来说,都是小菜一碟啦。
SVM入门(六)线性分类器的求解——问题的转化,直观角度
让我再一次比较完整的重复一下我们要解决的问题:我们有属于两个类别的样本点(并不限定这些点在二维空间中)若干,如图,
圆形的样本点定为正样本(连带着,我们可以把正样本所属的类叫做正类),方形的点定为负例。我们想求得这样一个线性函数(在n维空间中的线性函数):
g(x)=wx+b
使得所有属于正类的点+代入以后有g(x+)≥1,而所有属于负类的点x-代入后有g(x-)≤-1(之所以总跟1比较,无论正一还是负一,都是因为我们固定了间隔为1,注意间隔和几何间隔的区别)。代入g(x)后的值如果在1和-1之间,我们就拒绝判断。
求这样的g(x)的过程就是求w(一个n维向量)和b(一个实数)两个参数的过程(但实际上只需要求w,求得以后找某些样本点代入就可以求得b)。因此在求g(x)的时候,w才是变量。
你肯定能看出来,一旦求出了w(也就求出了b),那么中间的直线H就知道了(因为它就是wx+b=0嘛,哈哈),那么H1和H2也就知道了(因为三者是平行的,而且相隔的距离还是||w||决定的)。那么w是谁决定的?显然是你给的样本决定的,一旦你在空间中给出了那些个样本点,三条直线的位置实际上就唯一确定了(因为我们求的是最优的那三条,当然是唯一的),我们解优化问题的过程也只不过是把这个确定了的东西算出来而已。
样本确定了w,用数学的语言描述,就是w可以表示为样本的某种组合:
w=α1x1+α2x2+…+αnxn
式子中的αi是一个一个的数(在严格的证明过程中,这些α被称为拉格朗日乘子),而xi是样本点,因而是向量,n就是总样本点的个数。为了方便描述,以下开始严格区别数字与向量的乘积和向量间的乘积,我会用α1x1表示数字和向量的乘积,而用<x1,x2>表示向量x1,x2的内积(也叫点积,注意与向量叉积的区别)。因此g(x)的表达式严格的形式应该是:
g(x)=<w,x>+b
但是上面的式子还不够好,你回头看看图中正样本和负样本的位置,想像一下,我不动所有点的位置,而只是把其中一个正样本点定为负样本点(也就是把一个点的形状从圆形变为方形),结果怎么样?三条直线都必须移动(因为对这三条直线的要求是必须把方形和圆形的点正确分开)!这说明w不仅跟样本点的位置有关,还跟样本的类别有关(也就是和样本的“标签”有关)。因此用下面这个式子表示才算完整:
w=α1y1x1+α2y2x2+…+αnynxn (式1)
其中的yi就是第i个样本的标签,它等于1或者-1。其实以上式子的那一堆拉格朗日乘子中,只有很少的一部分不等于0(不等于0才对w起决定作用),这部分不等于0的拉格朗日乘子后面所乘的样本点,其实都落在H1和H2上,也正是这部分样本(而不需要全部样本)唯一的确定了分类函数,当然,更严格的说,这些样本的一部分就可以确定,因为例如确定一条直线,只需要两个点就可以,即便有三五个都落在上面,我们也不是全都需要。这部分我们真正需要的样本点,就叫做支持(撑)向量!(名字还挺形象吧,他们“撑”起了分界线)
式子也可以用求和符号简写一下:
因此原来的g(x)表达式可以写为:
注意式子中x才是变量,也就是你要分类哪篇文档,就把该文档的向量表示代入到 x的位置,而所有的xi统统都是已知的样本。还注意到式子中只有xi和x是向量,因此一部分可以从内积符号中拿出来,得到g(x)的式子为:

发现了什么?w不见啦!从求w变成了求α。
但肯定有人会说,这并没有把原问题简化呀。嘿嘿,其实简化了,只不过在你看不见的地方,以这样的形式描述问题以后,我们的优化问题少了很大一部分不等式约束(记得这是我们解不了极值问题的万恶之源)。但是接下来先跳过线性分类器求解的部分,来看看 SVM在线性分类器上所做的重大改进——核函数。
SVM入门(七)为何需要核函数
生存?还是毁灭?——哈姆雷特
可分?还是不可分?——支持向量机
之前一直在讨论的线性分类器,器如其名(汗,这是什么说法啊),只能对线性可分的样本做处理。如果提供的样本线性不可分,结果很简单,线性分类器的求解程序会无限循环,永远也解不出来。这必然使得它的适用范围大大缩小,而它的很多优点我们实在不原意放弃,怎么办呢?是否有某种方法,让线性不可分的数据变得线性可分呢?
有!其思想说来也简单,来用一个二维平面中的分类问题作例子,你一看就会明白。事先声明,下面这个例子是网络早就有的,我一时找不到原作者的正确信息,在此借用,并加进了我自己的解说而已。
例子是下面这张图:
/
我们把横轴上端点a和b之间红色部分里的所有点定为正类,两边的黑色部分里的点定为负类。试问能找到一个线性函数把两类正确分开么?不能,因为二维空间里的线性函数就是指直线,显然找不到符合条件的直线。
但我们可以找到一条曲线,例如下面这一条:

显然通过点在这条曲线的上方还是下方就可以判断点所属的类别(你在横轴上随便找一点,算算这一点的函数值,会发现负类的点函数值一定比0大,而正类的一定比0小)。这条曲线就是我们熟知的二次曲线,它的函数表达式可以写为:
![]()
问题只是它不是一个线性函数,但是,下面要注意看了,新建一个向量y和a:
这样g(x)就可以转化为f(y)=<a,y>,你可以把y和a分别回带一下,看看等不等于原来的g(x)。用内积的形式写你可能看不太清楚,实际上f(y)的形式就是:
g(x)=f(y)=ay
在任意维度的空间中,这种形式的函数都是一个线性函数(只不过其中的a和y都是多维向量罢了),因为自变量y的次数不大于1。
看出妙在哪了么?原来在二维空间中一个线性不可分的问题,映射到四维空间后,变成了线性可分的!因此这也形成了我们最初想解决线性不可分问题的基本思路——向高维空间转化,使其变得线性可分。
而转化最关键的部分就在于找到x到y的映射方法。遗憾的是,如何找到这个映射,没有系统性的方法(也就是说,纯靠猜和凑)。具体到我们的文本分类问题,文本被表示为上千维的向量,即使维数已经如此之高,也常常是线性不可分的,还要向更高的空间转化。其中的难度可想而知。
小Tips:为什么说f(y)=ay是四维空间里的函数?
大家可能一时没看明白。回想一下我们二维空间里的函数定义
g(x)=ax+b
变量x是一维的,为什么说它是二维空间里的函数呢?因为还有一个变量我们没写出来,它的完整形式其实是
y=g(x)=ax+b
即
y=ax+b
看看,有几个变量?两个。那是几维空间的函数?(作者五岁的弟弟答:五维的。作者:……)
再看看
f(y)=ay
里面的y是三维的变量,那f(y)是几维空间里的函数?(作者五岁的弟弟答:还是五维的。作者:……)
用一个具体文本分类的例子来看看这种向高维空间映射从而分类的方法如何运作,想象一下,我们文本分类问题的原始空间是1000维的(即每个要被分类的文档被表示为一个1000维的向量),在这个维度上问题是线性不可分的。现在我们有一个2000维空间里的线性函数
f(x’)=<w’,x’>+b
注意向量的右上角有个 ’哦。它能够将原问题变得可分。式中的 w’和x’都是2000维的向量,只不过w’是定值,而x’是变量(好吧,严格说来这个函数是2001维的,哈哈),现在我们的输入呢,是一个1000维的向量x,分类的过程是先把x变换为2000维的向量x’,然后求这个变换后的向量x’与向量w’的内积,再把这个内积的值和b相加,就得到了结果,看结果大于阈值还是小于阈值就得到了分类结果。
你发现了什么?我们其实只关心那个高维空间里内积的值,那个值算出来了,分类结果就算出来了。而从理论上说, x’是经由x变换来的,因此广义上可以把它叫做x的函数(有一个x,就确定了一个x’,对吧,确定不出第二个),而w’是常量,它是一个低维空间里的常量w经过变换得到的,所以给了一个w 和x的值,就有一个确定的f(x’)值与其对应。这让我们幻想,是否能有这样一种函数K(w,x),他接受低维空间的输入值,却能算出高维空间的内积值<w’,x’>?
如果有这样的函数,那么当给了一个低维空间的输入x以后,
g(x)=K(w,x)+b
f(x’)=<w’,x’>+b
这两个函数的计算结果就完全一样,我们也就用不着费力找那个映射关系,直接拿低维的输入往g(x)里面代就可以了(再次提醒,这回的g(x)就不是线性函数啦,因为你不能保证K(w,x)这个表达式里的x次数不高于1哦)。
万幸的是,这样的K(w,x)确实存在(发现凡是我们人类能解决的问题,大都是巧得不能再巧,特殊得不能再特殊的问题,总是恰好有些能投机取巧的地方才能解决,由此感到人类的渺小),它被称作核函数(核,kernel),而且还不止一个,事实上,只要是满足了Mercer条件的函数,都可以作为核函数。核函数的基本作用就是接受两个低维空间里的向量,能够计算出经过某个变换后在高维空间里的向量内积值。几个比较常用的核函数,俄,教课书里都列过,我就不敲了(懒!)。
回想我们上节说的求一个线性分类器,它的形式应该是:
现在这个就是高维空间里的线性函数(为了区别低维和高维空间里的函数和向量,我改了函数的名字,并且给w和x都加上了 ’),我们就可以用一个低维空间里的函数(再一次的,这个低维空间里的函数就不再是线性的啦)来代替,

又发现什么了?f(x’) 和g(x)里的α,y,b全都是一样一样的!这就是说,尽管给的问题是线性不可分的,但是我们就硬当它是线性问题来求解,只不过求解过程中,凡是要求内积的时候就用你选定的核函数来算。这样求出来的α再和你选定的核函数一组合,就得到分类器啦!
明白了以上这些,会自然的问接下来两个问题:
1. 既然有很多的核函数,针对具体问题该怎么选择?
2. 如果使用核函数向高维空间映射后,问题仍然是线性不可分的,那怎么办?
第一个问题现在就可以回答你:对核函数的选择,现在还缺乏指导原则!各种实验的观察结果(不光是文本分类)的确表明,某些问题用某些核函数效果很好,用另一些就很差,但是一般来讲,径向基核函数是不会出太大偏差的一种,首选。(我做文本分类系统的时候,使用径向基核函数,没有参数调优的情况下,绝大部分类别的准确和召回都在85%以上,可见。虽然libSVM的作者林智仁认为文本分类用线性核函数效果更佳,待考证)
对第二个问题的解决则引出了我们下一节的主题:松弛变量。
SVM入门(八)松弛变量
现在我们已经把一个本来线性不可分的文本分类问题,通过映射到高维空间而变成了线性可分的。就像下图这样:
圆形和方形的点各有成千上万个(毕竟,这就是我们训练集中文档的数量嘛,当然很大了)。现在想象我们有另一个训练集,只比原先这个训练集多了一篇文章,映射到高维空间以后(当然,也使用了相同的核函数),也就多了一个样本点,但是这个样本的位置是这样的:
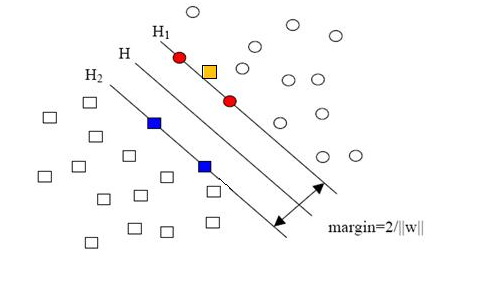
就是图中黄色那个点,它是方形的,因而它是负类的一个样本,这单独的一个样本,使得原本线性可分的问题变成了线性不可分的。这样类似的问题(仅有少数点线性不可分)叫做“近似线性可分”的问题。
以我们人类的常识来判断,说有一万个点都符合某种规律(因而线性可分),有一个点不符合,那这一个点是否就代表了分类规则中我们没有考虑到的方面呢(因而规则应该为它而做出修改)?
其实我们会觉得,更有可能的是,这个样本点压根就是错误,是噪声,是提供训练集的同学人工分类时一打瞌睡错放进去的。所以我们会简单的忽略这个样本点,仍然使用原来的分类器,其效果丝毫不受影响。
但这种对噪声的容错性是人的思维带来的,我们的程序可没有。由于我们原本的优化问题的表达式中,确实要考虑所有的样本点(不能忽略某一个,因为程序它怎么知道该忽略哪一个呢?),在此基础上寻找正负类之间的最大几何间隔,而几何间隔本身代表的是距离,是非负的,像上面这种有噪声的情况会使得整个问题无解。这种解法其实也叫做“硬间隔”分类法,因为他硬性的要求所有样本点都满足和分类平面间的距离必须大于某个值。
因此由上面的例子中也可以看出,硬间隔的分类法其结果容易受少数点的控制,这是很危险的(尽管有句话说真理总是掌握在少数人手中,但那不过是那一小撮人聊以自慰的词句罢了,咱还是得民主)。
但解决方法也很明显,就是仿照人的思路,允许一些点到分类平面的距离不满足原先的要求。由于不同的训练集各点的间距尺度不太一样,因此用间隔(而不是几何间隔)来衡量有利于我们表达形式的简洁。我们原先对样本点的要求是:
![]()
意思是说离分类面最近的样本点函数间隔也要比1大。如果要引入容错性,就给1这个硬性的阈值加一个松弛变量,即允许

因为松弛变量是非负的,因此最终的结果是要求间隔可以比1小。但是当某些点出现这种间隔比1小的情况时(这些点也叫离群点),意味着我们放弃了对这些点的精确分类,而这对我们的分类器来说是种损失。但是放弃这些点也带来了好处,那就是使分类面不必向这些点的方向移动,因而可以得到更大的几何间隔(在低维空间看来,分类边界也更平滑)。显然我们必须权衡这种损失和好处。好处很明显,我们得到的分类间隔越大,好处就越多。回顾我们原始的硬间隔分类对应的优化问题:

||w||2就是我们的目标函数(当然系数可有可无),希望它越小越好,因而损失就必然是一个能使之变大的量(能使它变小就不叫损失了,我们本来就希望目标函数值越小越好)。那如何来衡量损失,有两种常用的方式,有人喜欢用

而有人喜欢用

其中l都是样本的数目。两种方法没有大的区别。如果选择了第一种,得到的方法的就叫做二阶软间隔分类器,第二种就叫做一阶软间隔分类器。把损失加入到目标函数里的时候,就需要一个惩罚因子(cost,也就是libSVM的诸多参数中的C),原来的优化问题就变成了下面这样:
这个式子有这么几点要注意:
一是并非所有的样本点都有一个松弛变量与其对应。实际上只有“离群点”才有,或者也可以这么看,所有没离群的点松弛变量都等于0(对负类来说,离群点就是在前面图中,跑到H2右侧的那些负样本点,对正类来说,就是跑到H1左侧的那些正样本点)。
【在迭代求w的时候如何样本点非离群点,即分类正确,那么就设它的松弛变量为0了。。。】
二是松弛变量的值实际上标示出了对应的点到底离群有多远,值越大,点就越远。
三是惩罚因子C决定了你有多重视离群点带来的损失,显然当所有离群点的松弛变量的和一定时,你定的C越大,对目标函数的损失也越大,此时就暗示着你非常不愿意放弃这些离群点,最极端的情况是你把C定为无限大,这样只要稍有一个点离群,目标函数的值马上变成无限大,马上让问题变成无解,这就退化成了硬间隔问题。
四是惩罚因子C不是一个变量,整个优化问题在解的时候,C是一个你必须事先指定的值,指定这个值以后,解一下,得到一个分类器,然后用测试数据看看结果怎么样,如果不够好,换一个C的值,再解一次优化问题,得到另一个分类器,再看看效果,如此就是一个参数寻优的过程,但这和优化问题本身决不是一回事,优化问题在解的过程中,C一直是定值,要记住。
五是尽管加了松弛变量这么一说,但这个优化问题仍然是一个优化问题(汗,这不废话么),解它的过程比起原始的硬间隔问题来说,没有任何更加特殊的地方。
从大的方面说优化问题解的过程,就是先试着确定一下w,也就是确定了前面图中的三条直线,这时看看间隔有多大,又有多少点离群,把目标函数的值算一算,再换一组三条直线(你可以看到,分类的直线位置如果移动了,有些原来离群的点会变得不再离群,而有的本来不离群的点会变成离群点),再把目标函数的值算一算,如此往复(迭代),直到最终找到目标函数最小时的w。
啰嗦了这么多,读者一定可以马上自己总结出来,松弛变量也就是个解决线性不可分问题的方法罢了,但是回想一下,核函数的引入不也是为了解决线性不可分的问题么?为什么要为了一个问题使用两种方法呢?
其实两者还有微妙的不同。一般的过程应该是这样,还以文本分类为例。在原始的低维空间中,样本相当的不可分,无论你怎么找分类平面,总会有大量的离群点,此时用核函数向高维空间映射一下,虽然结果仍然是不可分的,但比原始空间里的要更加接近线性可分的状态(就是达到了近似线性可分的状态),此时再用松弛变量处理那些少数“冥顽不化”的离群点,就简单有效得多啦。
本节中的(式1)也确实是支持向量机最最常用的形式。至此一个比较完整的支持向量机框架就有了,简单说来,支持向量机就是使用了核函数的软间隔线性分类法。
下一节会说说松弛变量剩下的一点点东西,顺便搞个读者调查,看看大家还想侃侃SVM的哪些方面。
SVM入门(九)松弛变量(续)
接下来要说的东西其实不是松弛变量本身,但由于是为了使用松弛变量才引入的,因此放在这里也算合适,那就是惩罚因子C。回头看一眼引入了松弛变量以后的优化问题:
注意其中C的位置,也可以回想一下C所起的作用(表征你有多么重视离群点,C越大越重视,越不想丢掉它们)。这个式子是以前做SVM的人写的,大家也就这么用,但没有任何规定说必须对所有的松弛变量都使用同一个惩罚因子,我们完全可以给每一个离群点都使用不同的C,这时就意味着你对每个样本的重视程度都不一样,有些样本丢了也就丢了,错了也就错了,这些就给一个比较小的C;而有些样本很重要,决不能分类错误(比如中央下达的文件啥的,笑),就给一个很大的C。
当然实际使用的时候并没有这么极端,但一种很常用的变形可以用来解决分类问题中样本的“偏斜”问题。
先来说说样本的偏斜问题,也叫数据集偏斜(unbalanced),它指的是参与分类的两个类别(也可以指多个类别)样本数量差异很大。比如说正类有10,000个样本,而负类只给了100个,这会引起的问题显而易见,可以看看下面的图:
方形的点是负类。H,H1,H2是根据给的样本算出来的分类面,由于负类的样本很少很少,所以有一些本来是负类的样本点没有提供,比如图中两个灰色的方形点,如果这两个点有提供的话,那算出来的分类面应该是H’,H2’和H1,他们显然和之前的结果有出入,实际上负类给的样本点越多,就越容易出现在灰色点附近的点,我们算出的结果也就越接近于真实的分类面。但现在由于偏斜的现象存在,使得数量多的正类可以把分类面向负类的方向“推”,因而影响了结果的准确性。
对付数据集偏斜问题的方法之一就是在惩罚因子上作文章,想必大家也猜到了,那就是给样本数量少的负类更大的惩罚因子,表示我们重视这部分样本(本来数量就少,再抛弃一些,那人家负类还活不活了),因此我们的目标函数中因松弛变量而损失的部分就变成了:

其中i=1…p都是正样本,j=p+1…p+q都是负样本。libSVM这个算法包在解决偏斜问题的时候用的就是这种方法。
那C+和C-怎么确定呢?它们的大小是试出来的(参数调优),但是他们的比例可以有些方法来确定。咱们先假定说C+是5这么大,那确定C-的一个很直观的方法就是使用两类样本数的比来算,对应到刚才举的例子,C-就可以定为500这么大(因为10,000:100=100:1嘛)。
但是这样并不够好,回看刚才的图,你会发现正类之所以可以“欺负”负类,其实并不是因为负类样本少,真实的原因是负类的样本分布的不够广(没扩充到负类本应该有的区域)。说一个具体点的例子,现在想给政治类和体育类的文章做分类,政治类文章很多,而体育类只提供了几篇关于篮球的文章,这时分类会明显偏向于政治类,如果要给体育类文章增加样本,但增加的样本仍然全都是关于篮球的(也就是说,没有足球,排球,赛车,游泳等等),那结果会怎样呢?虽然体育类文章在数量上可以达到与政治类一样多,但过于集中了,结果仍会偏向于政治类!所以给C+和C-确定比例更好的方法应该是衡量他们分布的程度。比如可以算算他们在空间中占据了多大的体积,例如给负类找一个超球——就是高维空间里的球啦——它可以包含所有负类的样本,再给正类找一个,比比两个球的半径,就可以大致确定分布的情况。显然半径大的分布就比较广,就给小一点的惩罚因子。
但是这样还不够好,因为有的类别样本确实很集中,这不是提供的样本数量多少的问题,这是类别本身的特征(就是某些话题涉及的面很窄,例如计算机类的文章就明显不如文化类的文章那么“天马行空”),这个时候即便超球的半径差异很大,也不应该赋予两个类别不同的惩罚因子。
看到这里读者一定疯了,因为说来说去,这岂不成了一个解决不了的问题?然而事实如此,完全的方法是没有的,根据需要,选择实现简单又合用的就好(例如libSVM就直接使用样本数量的比)。
SVM入门(十)将SVM用于多类分类
从 SVM的那几张图可以看出来,SVM是一种典型的两类分类器,即它只回答属于正类还是负类的问题。而现实中要解决的问题,往往是多类的问题(少部分例外,例如垃圾邮件过滤,就只需要确定“是”还是“不是”垃圾邮件),比如文本分类,比如数字识别。如何由两类分类器得到多类分类器,就是一个值得研究的问题。
还以文本分类为例,现成的方法有很多,其中一种一劳永逸的方法,就是真的一次性考虑所有样本,并求解一个多目标函数的优化问题,一次性得到多个分类面,就像下图这样:
多个超平面把空间划分为多个区域,每个区域对应一个类别,给一篇文章,看它落在哪个区域就知道了它的分类。
看起来很美对不对?只可惜这种算法还基本停留在纸面上,因为一次性求解的方法计算量实在太大,大到无法实用的地步。
稍稍退一步,我们就会想到所谓“一类对其余”的方法,就是每次仍然解一个两类分类的问题。比如我们有5个类别,第一次就把类别1的样本定为正样本,其余2,3,4,5的样本合起来定为负样本,这样得到一个两类分类器,它能够指出一篇文章是还是不是第1类的;第二次我们把类别2 的样本定为正样本,把1,3,4,5的样本合起来定为负样本,得到一个分类器,如此下去,我们可以得到5个这样的两类分类器(总是和类别的数目一致)。到了有文章需要分类的时候,我们就拿着这篇文章挨个分类器的问:是属于你的么?是属于你的么?哪个分类器点头说是了,文章的类别就确定了。这种方法的好处是每个优化问题的规模比较小,而且分类的时候速度很快(只需要调用5个分类器就知道了结果)。但有时也会出现两种很尴尬的情况,例如拿一篇文章问了一圈,每一个分类器都说它是属于它那一类的,或者每一个分类器都说它不是它那一类的,前者叫分类重叠现象,后者叫不可分类现象。分类重叠倒还好办,随便选一个结果都不至于太离谱,或者看看这篇文章到各个超平面的距离,哪个远就判给哪个。不可分类现象就着实难办了,只能把它分给第6个类别了……更要命的是,本来各个类别的样本数目是差不多的,但“其余”的那一类样本数总是要数倍于正类(因为它是除正类以外其他类别的样本之和嘛),这就人为的造成了上一节所说的“数据集偏斜”问题。
因此我们还得再退一步,还是解两类分类问题,还是每次选一个类的样本作正类样本,而负类样本则变成只选一个类(称为“一对一单挑”的方法,哦,不对,没有单挑,就是“一对一”的方法,呵呵),这就避免了偏斜。因此过程就是算出这样一些分类器,第一个只回答“是第1类还是第2类”,第二个只回答“是第1类还是第3类”,第三个只回答“是第1类还是第4类”,如此下去,你也可以马上得出,这样的分类器应该有5 X 4/2=10个(通式是,如果有k个类别,则总的两类分类器数目为k(k-1)/2)。虽然分类器的数目多了,但是在训练阶段(也就是算出这些分类器的分类平面时)所用的总时间却比“一类对其余”方法少很多,在真正用来分类的时候,把一篇文章扔给所有分类器,第一个分类器会投票说它是“1”或者“2”,第二个会说它是“1”或者“3”,让每一个都投上自己的一票,最后统计票数,如果类别“1”得票最多,就判这篇文章属于第1类。这种方法显然也会有分类重叠的现象,但不会有不可分类现象,因为总不可能所有类别的票数都是0。看起来够好么?其实不然,想想分类一篇文章,我们调用了多少个分类器?10个,这还是类别数为5的时候,类别数如果是1000,要调用的分类器数目会上升至约500,000个(类别数的平方量级)。这如何是好?
看来我们必须再退一步,在分类的时候下功夫,我们还是像一对一方法那样来训练,只是在对一篇文章进行分类之前,我们先按照下面图的样子来组织分类器(如你所见,这是一个有向无环图,因此这种方法也叫做DAG SVM)

这样在分类时,我们就可以先问分类器“1对5”(意思是它能够回答“是第1类还是第5类”),如果它回答5,我们就往左走,再问“2对5”这个分类器,如果它还说是“5”,我们就继续往左走,这样一直问下去,就可以得到分类结果。好处在哪?我们其实只调用了4个分类器(如果类别数是k,则只调用k-1个),分类速度飞快,且没有分类重叠和不可分类现象!缺点在哪?假如最一开始的分类器回答错误(明明是类别1的文章,它说成了5),那么后面的分类器是无论如何也无法纠正它的错误的(因为后面的分类器压根没有出现“1”这个类别标签),其实对下面每一层的分类器都存在这种错误向下累积的现象。。
不过不要被DAG方法的错误累积吓倒,错误累积在一对其余和一对一方法中也都存在,DAG方法好于它们的地方就在于,累积的上限,不管是大是小,总是有定论的,有理论证明。而一对其余和一对一方法中,尽管每一个两类分类器的泛化误差限是知道的,但是合起来做多类分类的时候,误差上界是多少,没人知道,这意味着准确率低到0也是有可能的,这多让人郁闷。
而且现在DAG方法根节点的选取(也就是如何选第一个参与分类的分类器),也有一些方法可以改善整体效果,我们总希望根节点少犯错误为好,因此参与第一次分类的两个类别,最好是差别特别特别大,大到以至于不太可能把他们分错;或者我们就总取在两类分类中正确率最高的那个分类器作根节点,或者我们让两类分类器在分类的时候,不光输出类别的标签,还输出一个类似“置信度”的东东,当它对自己的结果不太自信的时候,我们就不光按照它的输出走,把它旁边的那条路也走一走,等等。
大Tips:SVM的计算复杂度
使用SVM进行分类的时候,实际上是训练和分类两个完全不同的过程,因而讨论复杂度就不能一概而论,我们这里所说的主要是训练阶段的复杂度,即解那个二次规划问题的复杂度。对这个问题的解,基本上要划分为两大块,解析解和数值解。
解析解就是理论上的解,它的形式是表达式,因此它是精确的,一个问题只要有解(无解的问题还跟着掺和什么呀,哈哈),那它的解析解是一定存在的。当然存在是一回事,能够解出来,或者可以在可以承受的时间范围内解出来,就是另一回事了。对SVM来说,求得解析解的时间复杂度最坏可以达到O(Nsv3),其中Nsv是支持向量的个数,而虽然没有固定的比例,但支持向量的个数多少也和训练集的大小有关。
数值解就是可以使用的解,是一个一个的数,往往都是近似解。求数值解的过程非常像穷举法,从一个数开始,试一试它当解效果怎样,不满足一定条件(叫做停机条件,就是满足这个以后就认为解足够精确了,不需要继续算下去了)就试下一个,当然下一个数不是乱选的,也有一定章法可循。有的算法,每次只尝试一个数,有的就尝试多个,而且找下一个数字(或下一组数)的方法也各不相同,停机条件也各不相同,最终得到的解精度也各不相同,可见对求数值解的复杂度的讨论不能脱开具体的算法。
一个具体的算法,Bunch-Kaufman训练算法,典型的时间复杂度在O(Nsv3+LNsv2+dLNsv)和O(dL2)之间,其中Nsv是支持向量的个数,L是训练集样本的个数,d是每个样本的维数(原始的维数,没有经过向高维空间映射之前的维数)。复杂度会有变化,是因为它不光跟输入问题的规模有关(不光和样本的数量,维数有关),也和问题最终的解有关(即支持向量有关),如果支持向量比较少,过程会快很多,如果支持向量很多,接近于样本的数量,就会产生O(dL2)这个十分糟糕的结果(给10,000个样本,每个样本1000维,基本就不用算了,算不出来,呵呵,而这种输入规模对文本分类来说太正常了)。
这样再回头看就会明白为什么一对一方法尽管要训练的两类分类器数量多,但总时间实际上比一对其余方法要少了,因为一对其余方法每次训练都考虑了所有样本(只是每次把不同的部分划分为正类或者负类而已),自然慢上很多。
转载:http://blog.csdn.net/luowen3405/article/details/6428325
标签:style blog http color os 使用 java io strong
原文地址:http://www.cnblogs.com/yunhai0417/p/3942135.html