标签:advance pre 类型 成员 limits 决定 inpu 空间 let
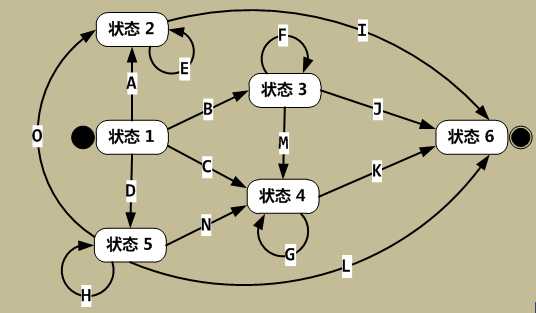
有限状态机,也称为FSM(Finite State Machine),其在任意时刻都处于有限状态集合中的某一状态。当其获得一个输入字符时,将从当前状态转换到另一个状态,或者仍然保持在当前状态。任何一个FSM都可以用状态转换图来描述,图中的节点表示FSM中的一个状态,有向加权边表示输入字符时状态的变化。如果图中不存在与当前状态与输入字符对应的有向边,则FSM将进入“消亡状态(Doom State)”,此后FSM将一直保持“消亡状态”。状态转换图中还有两个特殊状态:状态1称为“起始状态”,表示FSM的初始状态。状态6称为“结束状态”,表示成功识别了所输入的字符序列。
在启动一个FSM时,首先必须将FSM置于“起始状态”,然后输入一系列字符,最终,FSM会到达“结束状态”或者“消亡状态”。
说明:
在通常的FSM模型中,一般还存在一个“接受状态”,并且FSM可以从“接受状态”转换到另一个状态,只有在识别最后一个字符后,才会根据最终状态来决定是否接受所输入的字符串。此外,也可以将“其实状态”也作为接受状态,因此空的输入序列也是可以接受的。
程序设计思路大致如下:
通过输入字符从一个状态切换到另一个状态的过程,我们称之为一个映射。在计算机程序设计中,我们可以有两种表示映射的方法:
如下详细介绍这两种实现方式:
这种方式主要是通过条件分支来处理不同的字符,如if或者switch语句块,如
1 State* State1::Transition(char c) 2 { 3 switch(c) 4 { 5 case ‘A‘: 6 return &s2; 7 case ‘B‘: 8 return &s3; 9 case ‘C‘: 10 return &s4; 11 case ‘D‘: 12 return &s5; 13 case ‘\0‘: 14 return NULL; 15 default: 16 return NULL; 17 } 18 }
在如上的switch分支中,其使用类型大致相同,因此,我们可以考虑将相似的信息保存到一张表中,这样就可以在程序中避免很多函数调用。在每个状态中都使用一张转换表来表示映射关系,转换表的索引使用输入字符来表示。此外,由于通过转换表就可以描述不同状态之间的变化,那么就没有必要将每种状态定义为一个类了,即不需要多余的继承和虚函数了,仅使用一个State即可。
1 #include <limits.h> 2 3 class State 4 { 5 public: 6 State(); 7 State* transition[range]; 8 }; 9 10 对于任意一个状态state和输入字符c,后续状态都可以通过state.transition[c]来确定。 11 12 类Fsm中的成员state包含6个状态,为了对应方便,我们将结束状态放在state[0]中,每个状态都使用一个三元组 { 当前状态,输入字符,下一个状态 } 来表示: 13 14 struct TransGraph // use triple to describe map 15 { 16 int current_state; 17 char input_char; 18 int next_state; 19 };
如此,使用了转换表代替了虚函数,简化了程序的设计。
1 // fsm_with_passive_data.h 2 #ifndef FSM_WITH_PASSIVE_DATA_H 3 #define FSM_WITH_PASSIVE_DATA_H 4 5 #include <string.h> 6 #include <limits.h> // CHAR_MAX 7 8 const int range = CHAR_MAX + 1; 9 10 class State 11 { 12 public: 13 State(); 14 State* transition[range]; 15 }; 16 17 struct TransGraph // use triple to describe map 18 { 19 int current_state; 20 char input_char; 21 int next_state; 22 }; 23 24 class Fsm 25 { 26 public: 27 Fsm(); 28 void Reset(); // move to start state 29 void Advance(char c); // advance one transition 30 int EndState(); 31 int DoomState(); 32 33 private: 34 State* p_current; // &s1, &s2, ..., &s6; NULL ==> doom 35 State state[6]; // 6 states, state[0] is end state 36 }; 37 38 39 #endif // FSM_WITH_PASSIVE_DATA_H 40 41 // fsm_with_passive_data.cc 42 #include "fsm_with_passive_data.h" 43 44 State::State() 45 { 46 for (int i = 0; i < range; ++i) 47 transition[i] = NULL; 48 } 49 50 Fsm::Fsm() 51 { 52 static TransGraph graph[] = 53 { 54 {1, ‘A‘, 2}, {1, ‘B‘, 3}, {1, ‘C‘, 4}, {1, ‘D‘, 5}, 55 {2, ‘E‘, 2}, {2, ‘I‘, 0}, 56 {3, ‘F‘, 3}, {3, ‘J‘, 0}, {3, ‘M‘, 4}, 57 {4, ‘G‘, 4}, {4, ‘K‘, 0}, 58 {5, ‘H‘, 5}, {5, ‘L‘, 0}, {5, ‘O‘, 2}, {5, ‘N‘, 4}, 59 {0, 0, 0} 60 }; 61 62 for (TransGraph* p_tg = graph; p_tg->current_state != 0; ++p_tg) 63 state[p_tg->current_state].transition[p_tg->input_char] = &state[p_tg->next_state]; 64 65 p_current = NULL; 66 } 67 68 void Fsm::Reset() 69 { 70 p_current = &state[1]; 71 } 72 73 void Fsm::Advance(char c) 74 { 75 if (p_current != NULL) 76 p_current = p_current->transition[c]; 77 } 78 79 int Fsm::EndState() 80 { 81 return p_current == &state[0]; 82 } 83 84 int Fsm::DoomState() 85 { 86 return p_current == NULL; 87 } 88 89 // test_with_passive_data.cc 90 #include "fsm_with_passive_data.h" 91 92 #include "stdio.h" // printf, scanf 93 #include "stdlib.h" // system 94 95 void test_fsm() 96 { 97 char input_string[80]; 98 printf("Enter input expression: "); 99 scanf("%s", input_string); 100 101 Fsm fsm; 102 fsm.Reset(); 103 int index = 0; 104 fsm.Advance(input_string[index++]); 105 106 while (!fsm.EndState() && !fsm.DoomState()) 107 fsm.Advance(input_string[index++]); 108 109 if (fsm.EndState()) 110 printf("\nValid input expression"); 111 else 112 printf("\nInvalid input expression"); 113 } 114 115 116 int main() 117 { 118 test_fsm(); 119 120 system("pause"); 121 }
如果类Fsm可以表示任意类型的FSM,那么就更符合程序设计的要求了。在构造函数中执行的具体配置应该被泛化为一种机制,我们通过这种机制来建立任意的FSM。在Fsm的构造函数中,应该将转换表作为一个参数传入,而非包含具体的转换表,如此,则不需要将转换表的大小硬编码到Fsm中了。因此,在构造函数中必须动态地创建这个存放转换表的内存空间,在析构函数中记着销毁这块内存。
1 class Fsm 2 { 3 public: 4 Fsm(TransGraph* p_tg); 5 virtual ~Fsm(); 6 void Reset(); 7 void Advance(char c); 8 int EndState(); 9 int DoomState(); 10 11 private: 12 State* p_current; 13 State* p_state; 14 }; 15 16 Fsm::Fsm(TransGraph* p_tg) 17 { 18 int max_state = 0; // size for dynamically allocated graph 19 for (TransGraph* p_temp = p_tg; p_temp->current_state != 0; ++p_temp) 20 { 21 if (p_temp->current_state > max_state) 22 max_state = p_temp->current_state; 23 if (p_temp->next_state > max_state) 24 max_state = p_temp->next_state; 25 } 26 27 p_state = new State[max_state + 1]; 28 for (TransGraph* p_temp = p_tg; p_temp->current_state != 0; ++p_temp) 29 p_state[p_temp->current_state].transition[p_temp->input_char] = &p_state[p_temp->next_state]; 30 31 p_current = NULL; 32 } 33 34 Fsm::~Fsm() 35 { 36 delete []p_state; 37 }
1 // fsm_with_generalization.h 2 #ifndef FSM_WITH_GENERALIZATION_H 3 #define FSM_WITH_GENERALIZATION_H 4 5 #include <string.h> 6 #include <limits.h> // CHAR_MAX 7 8 const int range = CHAR_MAX + 1; 9 10 class State 11 { 12 public: 13 State(); 14 State* transition[range]; 15 }; 16 17 struct TransGraph 18 { 19 int current_state; 20 char input_char; 21 int next_state; 22 }; 23 24 class Fsm 25 { 26 public: 27 Fsm(TransGraph* p_tg); 28 virtual ~Fsm(); 29 void Reset(); 30 void Advance(char c); 31 int EndState(); 32 int DoomState(); 33 34 private: 35 State* p_current; 36 State* p_state; 37 }; 38 39 40 #endif // FSM_WITH_GENERALIZATION_H 41 42 // fsm_with_generalization.cc 43 #include "fsm_with_generalization.h" 44 45 State::State() 46 { 47 for (int i = 0; i < range; ++i) 48 transition[i] = NULL; 49 } 50 51 Fsm::Fsm(TransGraph* p_tg) 52 { 53 int max_state = 0; // size for dynamically allocated graph 54 for (TransGraph* p_temp = p_tg; p_temp->current_state != 0; ++p_temp) 55 { 56 if (p_temp->current_state > max_state) 57 max_state = p_temp->current_state; 58 if (p_temp->next_state > max_state) 59 max_state = p_temp->next_state; 60 } 61 62 p_state = new State[max_state + 1]; 63 for (TransGraph* p_temp = p_tg; p_temp->current_state != 0; ++p_temp) 64 p_state[p_temp->current_state].transition[p_temp->input_char] = &p_state[p_temp->next_state]; 65 66 p_current = NULL; 67 } 68 69 Fsm::~Fsm() 70 { 71 delete []p_state; 72 } 73 74 void Fsm::Reset() 75 { 76 p_current = &p_state[1]; 77 } 78 79 void Fsm::Advance(char c) 80 { 81 if (p_current != NULL) 82 p_current = p_current->transition[c]; 83 } 84 85 int Fsm::EndState() 86 { 87 return p_current == &p_state[0]; 88 } 89 90 int Fsm::DoomState() 91 { 92 return p_current == NULL; 93 } 94 95 // test_with_generalization.cc 96 #include "fsm_with_generalization.h" 97 98 #include "stdio.h" // printf, scanf 99 #include "stdlib.h" // system 100 101 void test_fsm() 102 { 103 char input_string[80]; 104 printf("Enter input expression: "); 105 scanf("%s", input_string); 106 107 TransGraph graph[] = 108 { 109 {1, ‘A‘, 2}, {1, ‘B‘, 3}, {1, ‘C‘, 4}, {1, ‘D‘, 5}, 110 {2, ‘E‘, 2}, {2, ‘I‘, 0}, 111 {3, ‘F‘, 3}, {3, ‘J‘, 0}, {3, ‘M‘, 4}, 112 {4, ‘G‘, 4}, {4, ‘K‘, 0}, 113 {5, ‘H‘, 5}, {5, ‘L‘, 0}, {5, ‘O‘, 2}, {5, ‘N‘, 4}, 114 {0, 0, 0} 115 }; 116 117 Fsm fsm(graph); 118 fsm.Reset(); 119 int index = 0; 120 fsm.Advance(input_string[index++]); 121 122 while (!fsm.EndState() && !fsm.DoomState()) 123 fsm.Advance(input_string[index++]); 124 125 if (fsm.EndState()) 126 printf("\nValid input expression"); 127 else 128 printf("\nInvalid input expression"); 129 } 130 131 132 int main() 133 { 134 test_fsm(); 135 136 system("pause"); 137 }
当然也可以将上述程序中的转换表不放在主程序中,而是由一个派生自Fsm的子类SpecificFsm提供,在SpecificFsm中设置具体的转换表,然后通过SpecificFsm的初始化列表传到基类Fsm中,这样在主程序中就可以使用SpecificFsm来进行操作了。
原文地址:http://www.cnblogs.com/benxintuzi/p/4931258.html
标签:advance pre 类型 成员 limits 决定 inpu 空间 let
原文地址:http://www.cnblogs.com/AaronBlogs/p/6978743.html