标签:根据 [1] 优化 idt 规划 src 通用 关系 http
先给一个线性规划的定义:
在通用的线性规划问题中,我们通常给定一个m*n的矩阵A,一个m维的向量和一个n维向量(权值函数)。我们希望找到一个n维向量x,使得在由Ax<=b给定的m个约束条件下优化目标函数![]() ci*xi,这里的优化是指目标函数的取值最大。
ci*xi,这里的优化是指目标函数的取值最大。
根据矩阵乘法,我们大概脑补出这样一幅图
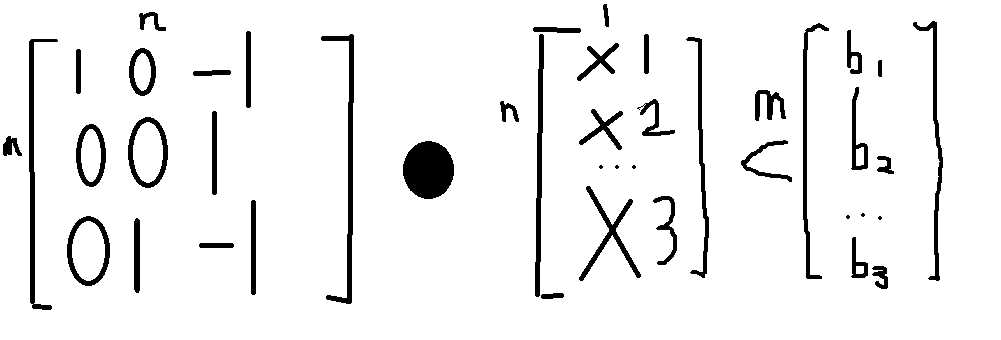
ps:上图中<号应为<=号(我会告诉你是我懒得改 )
通过化简我们得到 x1-x3<=b1;x3<=b2;x2-x3<=b3;
这跟我们的最短路径有什么关系呢?
在最短路径的三角不等式中,有dist[v]<=dist[u]+map[u][v];
貌似有点像!
上氏可以化简为x1<=x3+b1
所以可以看成在一张图内,x3到x1连了一条长为b1的边
为了方便求出其他几个点的解值,我们定义一个超原点为0,算出与其他点之间的最短距离,其他几个原点的其中一个解就是这个距离的数值(我们的差分关系都是建立在差的关系上,可以全部数加减一个值)
这是我们有问题了:如果算不出最短路径,怎么办?
恰巧的是,如果算不出最短路径,那么就是有负权环,然而这个线性约束就无解——没有一个实数符合这些约束。因为如果我们有一个环路(v1->v2->...->vn)
v1<=v2+map[v1][v2]
v2<=v3+map[v2][v3]
........
vn-1<=vn+map[vn-1][vn]
vn<=v1+map[1][n]
对于左右两边求和,得到0<=map[v1][v2]+map[v2][v3]+...+map[vn][1]
因为是负权环路,所以我们就有0<=一个负数
所以这个线性约束就无解啦。
标签:根据 [1] 优化 idt 规划 src 通用 关系 http
原文地址:http://www.cnblogs.com/dancer16/p/6979917.html