标签:style 方便 改变 带来 驱动 组成 处理 摘要 工程
机械臂的机电传动控制研究
摘要
机械臂是机器人中的重要组成部分,作为执行机构,有着操作灵活、控制方便、不易受环境因素影响的特点,使得它在工业机器人、家用机器人中有很好的前景,能够极大的提高生产效率,带来良好的社会效益。然而,现如今在机械臂研究领域,人们发现:机械臂的难点主要是在运动控制、机械/电气以及安全功能三个方面。本文主要结合所学课程——《机电传动控制》来研究其电机传动控制的相关问题。
关键词:机械臂,电机,传动、控制
机械臂都是通过关节驱动来实现终点轨迹实现,而其电机主要采用:直流电机、伺服电机、直驱电机、步进电机。其中以步进电机和伺服电机应用较多。各种电机的优缺点和使用场合见表1-1所示[3]。
表1-1 各种机械臂用关节电机特点
|
电机类型 |
优点 |
缺点 |
应用场合 |
|
直流电机 |
结构简单 控制方便 良好的启动性能 调速性能好 |
寿命短 结构复杂 电流通常较大 体积较大 惯量高 |
较大型机械臂 流水线机械臂 |
|
伺服电机 |
可控性好 控制功率小 控制精度高 |
带有反馈装置 价格较高 |
小型机器人 步行机器人 空间机械臂 |
|
直驱电机 |
直接驱动 很高的分辨率 低速大扭矩 |
体积较大 价格较高 |
较大型机器臂 |
|
步进电机 |
良好的跟随性 简单可靠 动态响应快 调速范围宽 |
脉冲电源供电 存在震荡和失步 噪声和振动较大 功率与自重比小 |
迷宫机器人 巡线跟踪机器人 |
从上表可以看出,各种电机的优缺点有差异,适应场所也有所不同。电机的选型是由需求来决定的,同时,对于电机的控制也随之形成。由于现有的机械臂都是多自由度的,有控制学理论知道,其控制难度增大。现如今较流行的机械臂研究是以模块化为基础的可重构机械臂系统,同时实现机械构造、电子系统、硬件结构、控制方式、软件实现等方面的重构。其中具体的技术就有:运动学解算、动力学解算、路径规划、任务规划、控制应用等。这些与我在大二加入的科创团队——足球机器人团队中的事项类似。我们团队所需要实现的运动要求是:通过视觉感应到小球的位置,然后踢球,这里还有一个比较大的难点——平衡。对于机器臂而言,大底板支撑,一般不会发生。机械组通过对整体的建模,以及运动学参数的确立,其他由控制组编程实现操作。
机械臂的控制原理可从开环、半闭环和闭环控制三方面考虑,开环控制中,只需要将预先设定的轨迹通过运动学、动力学方程求解转变成电机的输入控制(电压控制,可通过PWM直流斩波技术,或交流—直流技术来实现),这种由于电机的控制参数已经确定,但是当运动轨迹引起的速度变化比较复杂时,对电机的控制要求比较高,因此更适合小惯量的场合;半闭环控制中:是将驱动电机的输出角度作为反馈,适用于精度要求较高以及稳定要求较高的场所;而闭环控制,应用于精度非常高的场所,而这种就需要传感器的检测传感技术以及信号处理技术的高速性,减小延迟带来的滞后以及运动失真情况。而现如今对整体的自由度同时规划是非常困难的,因此更适合于模块化,同时也利用现如今较流行的遗传算法、机器学习、大数据等技术进行最优化设计来减小对电机的高要求[4]。具体控制图(这里我以普通永磁有刷直流电机为例,其原理为:电机两极的反电动势信号和转速成正比,通过A/D采集此信号,并在ARM微处理器中采用PID算法,输出PWM信号控制电机转速。)如下:
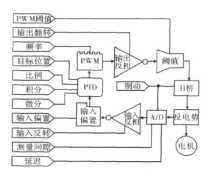
图2.1 驱动原理图
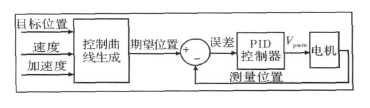
图2.2 PID反馈控制
通过查阅资料了解,其电机驱动控制器,也就是芯片控制,其采用的模式下列该种形式,如图2.3。
.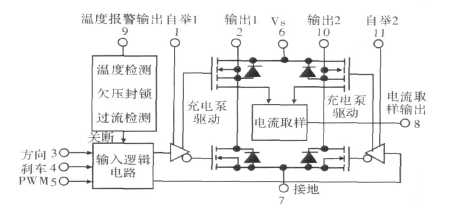
图2.3 微处理原理图
正如前面所看到的,在ARM中对电机的控制中,控制器不是直接给出终点位置参数,因为这样可能导致比例向过大,产生震荡,甚至损坏电机。这也验证前面所提高的逐步优化问题。通知,通过阅读文献发现,机械臂领域可以借鉴电动汽车领域的双电机驱动控制[2]。一个电机执行控制动作,另一个进行控制。是否可以将机器臂的一个关于加上两个两个电机以及行星轮,来实现更加精确的控制,当然另一方面,机械传动机构越多,控制系统约复杂,对各机械部件的精度要求越高,而对于目前的机器臂研究水平来说,还处于初期阶段,更加面向的是代替劳动力的普通生产动作,这也可能是在机械结构上没有太大改进的原因。
前面的原理中已经提到了电机的驱动电路,是通过PWM控制两端的电压来改变力矩,从而使机械臂运动。这里的驱动性能指标有以下几点:
1.输出电流和电压范围。它决定电路能驱动多大功率的电机;
2.效率。高的效率意味着节省电源,也会减少驱动电路的发热;
3.对控制输入端的影响。功率电路对其输入端应有良好的信号隔离,防止有高电压大电流进入主控电路;
4.对电源的影响。电压电流冲击都会影响电流的使用寿命;
5.可靠性。控制信号不影响驱动电路的安全性。
例如下图中的机械臂伺服控制模块图3.1知,驱动电路都是要经过微处理器处理然后通过PWM、运放电路再作用于电路,这就要求未处理器高校的运算性能[1]。
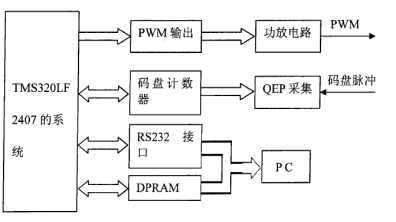
图3.1 机械伺服控制模块
其技术难点主要在:电机的锁定好,这需要电机自身的惯量小,而提供的力矩又比较大,对于在机器臂关节中的电机,它做好只作为力矩的提供者,而其他不影响,这样对机构本身的刚度影响不大,而且对于动力学计算式也不会太复杂,为了使锁定性能好,我们可以通过强磁场来控制(对于交流电机而言),对于直流,脉冲可能是最好的选择,这样步进电机本身的步距角就会影响精度,归根到底,机械本身的精度是影响最后的轨迹的效果,现有的控制理论以及十分丰富了。
由于现如今已经有很多像PID控制、鲁棒控制、自适应控制、变结构控制等相关理论,整体而言都是设定目标点、通过动力学、运动学得到各电机的初步控制参数,再通过运动过程中的PID纠正,来达到目标点[6]。而这里我想:既然机械轨迹具有很多的重复性,直接通过物联网技术、通过对大数据的处理、不断进行机械学习、迭代运算最后得到更好的结果。在Scaglia Indeva官网中我们可到,机械手中都以快、准来宣传,其中主要是采用几次保护措施作为辅助,而对于电机传动本身提及的很少。
机电传动控制作为机械装备领域中的大脑,它扮演着越来越重要的角色。像本文所介绍机械臂,它涉及多自由度问题,对我们现如今的动力学、运动学要求更高,系统更加复杂,对于该类结构,其产品的优化需要控制理论支撑、工业水平支撑甚至是现如今的机械学习等优化设计,也需要现如今微处理系统的突破等等。机电传动控制作为专业课很好的将实际问题展现在我们面前,也让我们认识到机电控制的美好前景,值得我们去探索。
[1].刘洋.单马达驱动多关节机械臂的关键技术研究D.武汉:华中科技大学,2009;
[2].黄喜平.电动对接装置机械臂设计和电机驱动研究D.哈尔滨:哈尔滨工程大学,2007:
[3].王宏源.机械臂关节用永磁无刷直流电动机的研究D.哈尔滨:哈尔滨工程大学,2006;
[4].左仲海.模块化机械臂运动学和动力学快速建模研究D.北京:北京邮电大学,2015;
[5].张羽,李雁斌.一种新颖电机控制方法及其在机械臂控制中的应用J.微机电,2008;
[6].赵志超.基于迭代学习的6-DOF机械臂轨迹跟踪控制研究D.沈阳:沈阳大学,2013;
标签:style 方便 改变 带来 驱动 组成 处理 摘要 工程
原文地址:http://www.cnblogs.com/ExtendingKnowledge/p/6985923.html