标签:... topic clip 简单的 step off blog pre pwm
目前的进度是, 首先, 用mbed, 在stm32 f103RB nucleo板子上, 跑一个简单的publisher, 然后用usb连接到PC上的ROS.
mbed的main.cpp:
/* * rosserial Publisher Example * Prints "hello world!" */ /* * left_forward PC_0 * left_backward PC_3 * right_forward PC_2 * right_backward PC_1 * left_pwm PA_6 * right_pwm PA_7 * encoder_left_a_add_int PC_10 * encoder_left_b_add_int PC_11 * encoder_right_a_add_int PC_12 * encoder_right_b_add_int PD_2 * */ #include"mbed.h" #include <ros.h> #include <string> #include <std_msgs/String.h> #include <iomanip> #include <locale> #include <sstream> #define PWM_STEP 0.001f DigitalOut myled(LED1); ros::NodeHandle nh; std_msgs::String str_msg; ros::Publisher chatter("chatter", &str_msg); DigitalOut left_forward(PC_0); DigitalOut left_backward(PC_3); DigitalOut right_forward(PC_2); DigitalOut right_backward(PC_1); DigitalOut led(LED1); PwmOut left_pwm(PA_6); PwmOut right_pwm(PA_7); InterruptIn button(USER_BUTTON); InterruptIn encoder_left_a_add_int(PC_10); InterruptIn encoder_left_b_add_int(PC_11); InterruptIn encoder_right_a_add_int(PC_12); InterruptIn encoder_right_b_add_int(PD_2); float leftPwmOut=0.0f; float rightPwmOut=0.0f; int pwmDirection=1; long long left_encoder_counter = 0; long long right_encoder_counter = 0; void left_encoder(void) { left_encoder_counter++; } void right_encoder(void) { right_encoder_counter++; } void setup(void) { left_forward=1; left_backward=0; right_forward=1; right_backward=0; left_pwm.period_us(100); right_pwm.period_us(100); //left_pwm.write(0.50f); //moto_pwm.write(1.0f); encoder_left_a_add_int.rise(&left_encoder); encoder_left_b_add_int.rise(&left_encoder); encoder_right_a_add_int.rise(&right_encoder); encoder_right_b_add_int.rise(&right_encoder); } float getPwm(float pwmout) { float result=0.0; if(pwmDirection) { result = pwmout + PWM_STEP; if(result >= 1.0f) { result = 1.0f; pwmDirection = 0; } } else { result = pwmout - PWM_STEP; if(result <= 0.0f) { result = 0.0f; pwmDirection = 1.0f; } } return result; } void publishChatter() { std::stringstream ss; ss<<"[odom]L:"<<left_encoder_counter<<",R:"<<right_encoder_counter; const std::string tmp = ss.str(); const char* cstr = tmp.c_str(); str_msg.data=cstr; chatter.publish( &str_msg ); nh.spinOnce(); } int main() { nh.initNode(); nh.advertise(chatter); //int i = 12345; setup(); //button.rise(&adder); //encoder_add_int.rise(&encoder); //nh.initNode(); //nh.advertise(chatter); while(1) { leftPwmOut=getPwm(leftPwmOut); rightPwmOut=getPwm(rightPwmOut); //right_pwm.write(rightPwmOut); //left_pwm.write(leftPwmOut); right_pwm.write(0.4f); left_pwm.write(0.4f); //myled = 1; // LED is ON wait(0.01); // 10 ms //myled = 0; // LED is OFF //wait(0.2); // 1 sec publishChatter(); } }
每隔10ms publish一次获得的编码器累加值.
ROS端用:
$ rosrun rosserial_python serial_node.py _port:=/dev/ttyACM0
跑一个py脚本, 跟nucleo通讯, 同时发布/chatter
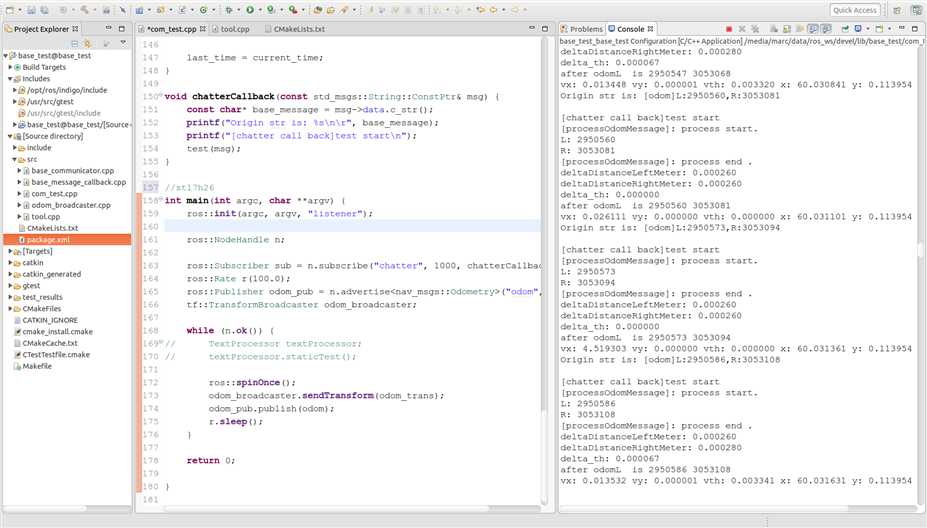
接着用Eclipse起一个节点, 接收chatter, 回调的时候, 将msg/string转一下, 然后计算vx, vy, vth, dl, dr, post跟twist, 拼一起, 做成一个odom的tf, 然后广告tf跟广播odom topic.
关于怎么在Eclipse里面简单的加入一个其他cpp的.h文件, 搞了我大半天...我啥时候才能入门c++... 我滴天呐...
tf的echo, 从base_link到odom:

标签:... topic clip 简单的 step off blog pre pwm
原文地址:http://www.cnblogs.com/Montauk/p/7027438.html