标签:style blog http 使用 io ar 2014 log sp
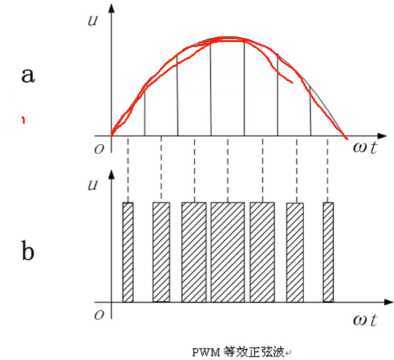
PWM是pulse width modulation的缩写,即脉冲宽度调制。其通过对一系列脉冲的宽度进行调制,来等效地获得所需要波形;
1、PWM是一种对模拟信号电平进行数字编码的方法。通过高分辨率计数器的使用,方波的占空比被调制,用来对一个具体模拟信号的电平进行编码。等效的实现是基于采样定理中的一个重要结论:冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相同。冲量即指窄脉冲的面接。这里所说的效果基本相同,是指该环节的输出响应波形基本相同。
2、如把各输出波形用傅立叶分析,则它们的低频特性非常接近,仅在高频段略有差异;
PWM信号是数字的,在给定的任何时刻,满幅值的直流供电要么完全有(ON),要么完全没有(OFF)。电压或电流源是以一种通(ON)或断(OFF)的重复脉冲序列被加到模拟负载上面去的。(简单的说就是 用数字的信号来控制负载达到模拟信号控制负载的效果;负载比如舵机)
改变脉冲的周期可以达到调频的效果,改变脉冲的宽度或占空比可以达到调压的效果,因此,采用适当控制方法即可使电压或电流与频率协调变化;
PWM控制具有很多优点:
1、从处理器到被控系统信号都是数字形式的,无需进行数模转换;
2、让信号保持为数字形式可将噪声影响降到最小,噪声只有在强到足以将逻辑1改变为逻辑0或将逻辑0改变为逻辑1时,也才能对数字信号产生影响,这是PWM用于通信的主要原因;
stm32的定时器除了TIM6和7。其他的定时器都可以用来产生PWM输出。其中高级定时器TIM1和TIM8可以同时产生7路的PWM输出。
而通用定时器也能同时产生多达4路PWM输出,这样,stm32最多可以同时产生30路PWM输出;(如果加上重映像的话,还可以更多)
STM32的pwm输出用两种模式,模式1和模式2,由TIMx_CCMRx寄存器的OCxM位确定的(“110”为模式1,“111”为模式2).模式1和模式2的区别如下:
“110”:pwm模式1-----在向上计数时,一旦TIMx_CNT<TIMx_CCR1时通道1为有效电平,否则为无效电平;在向上计数时,一旦TIMx_CNT>TIMx_CCR1时通道1为无效电平(OC1REF=0),否则为有效电平(OC1REF=1).
"111":pwm模式2-----在向上计数时,一旦TIMx_CNT<TIMx_CCR1时通道1为无效电平,否则为有效电平;在向下计数时,一旦TIMx_CNT>TIMx_CCR1时通道1为有效电平,否则为无效电平;
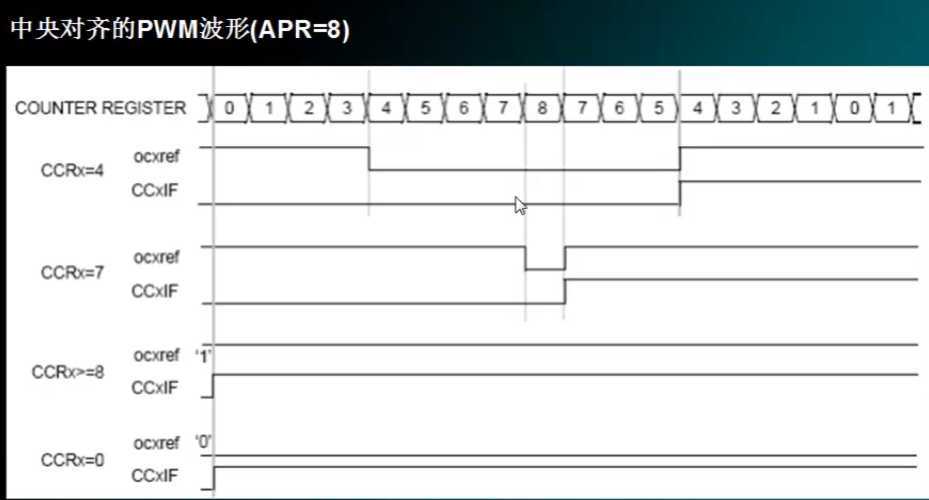
而从计数模式上看,PWM和TIMx作定时器时一样,也有向上计数模式、向下计数模式和中心对齐模式;
pwm的输出管脚是确定好的 :

不同的TIMx有分配不同的引脚,但是考虑到管脚复用功能,STM32提出了一个重映像的概念,就是说通过设置某一些相关的寄存器,来使得在其他非原始指定的管脚上也能输出PWM.
比如说TIM3的第2个通道,在没有重映像的时候,指定的管脚是PA.7,如果设置部分重映像之后,TIM3_CH2的输出就被映射到PB.5上了;如果设置了完全重映像的话,TIM3_CH2的输出就被映像到PC.7上了;
pwm输出的是一个方波信号,信号的频率是由TIMx的时钟频率和TIMx_ARR预分频器所决定的。具体的设置方法在前面定时器部分中详细说明了;二输出信号的占空比则是由TIMx_CRRx寄存器确定的。计算公式如下:
占空比=(TIMx_CRRx/TIMx_ARR)*100%
因此,可以通过向CRR中填入适当的值来输出自己需要的频率和占空比的方波信号;
1、设置RCC时钟;
2、设置GPIO时钟;GPIO模式应该设置为复用推挽输出GPIO_Model_AF_PP,如果需要引脚重映像的话,则需要用GPIO_PinRemapConfig()函数进行设置;
3、设置TIMx定时器的相关寄存器;与之前定时器寄存器设置一样;
4、设置TIMx定时器的PWM相关寄存器;
a、设置PWM模式(默认情况下PWM是董洁的)
b、设置占空比(公式计算)
c、设置输出比较极性(前面的介绍)
d、最重要的是使能TIMx的输出状态和使能TIMx的PWM输出使能;
相关设置完成之后,通过TIMx_Cmd()来打开TIMx定时器,从而得到PWM的输出;
标签:style blog http 使用 io ar 2014 log sp
原文地址:http://www.cnblogs.com/chris-cp/p/3946412.html