标签:log 刷新 python 节点 tle 显示 lam src images
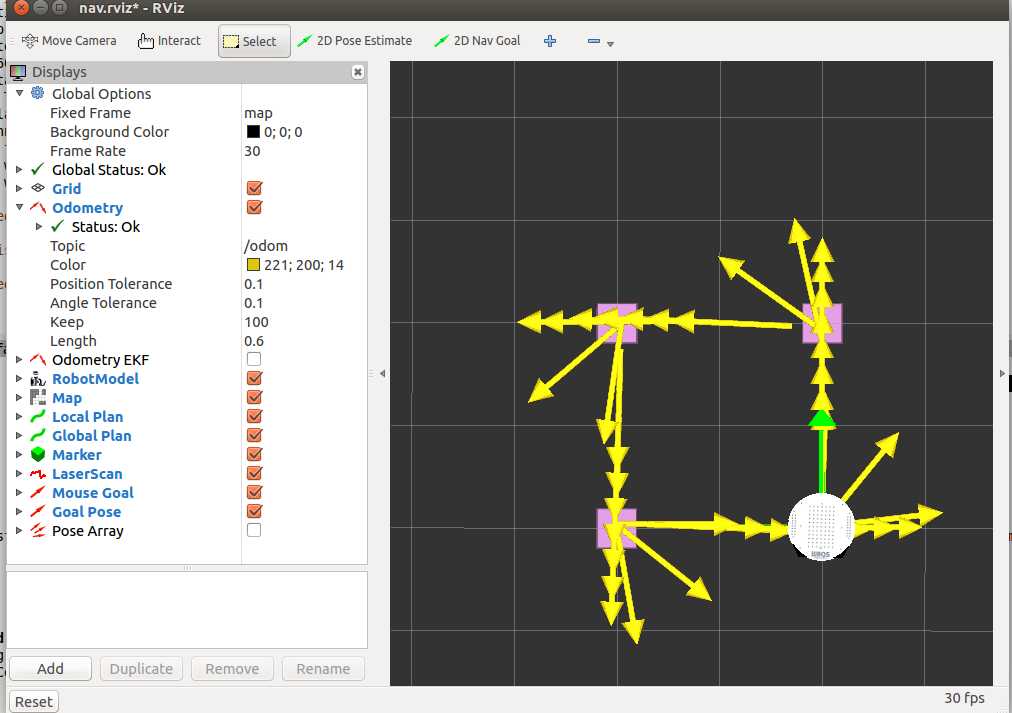
一、用move_base导航走正方形
1、
roscore
2、执行
roslaunch rbx1_bringup fake_turtlebot.launch
然后
roslaunch rbx1_nav fake_move_base_blank_map.launch
接着
rosrun rviz rviz -d `rospack find rbx1_nav`/nav.rviz
然后:
rosrun rbx1_nav move_base_square.py
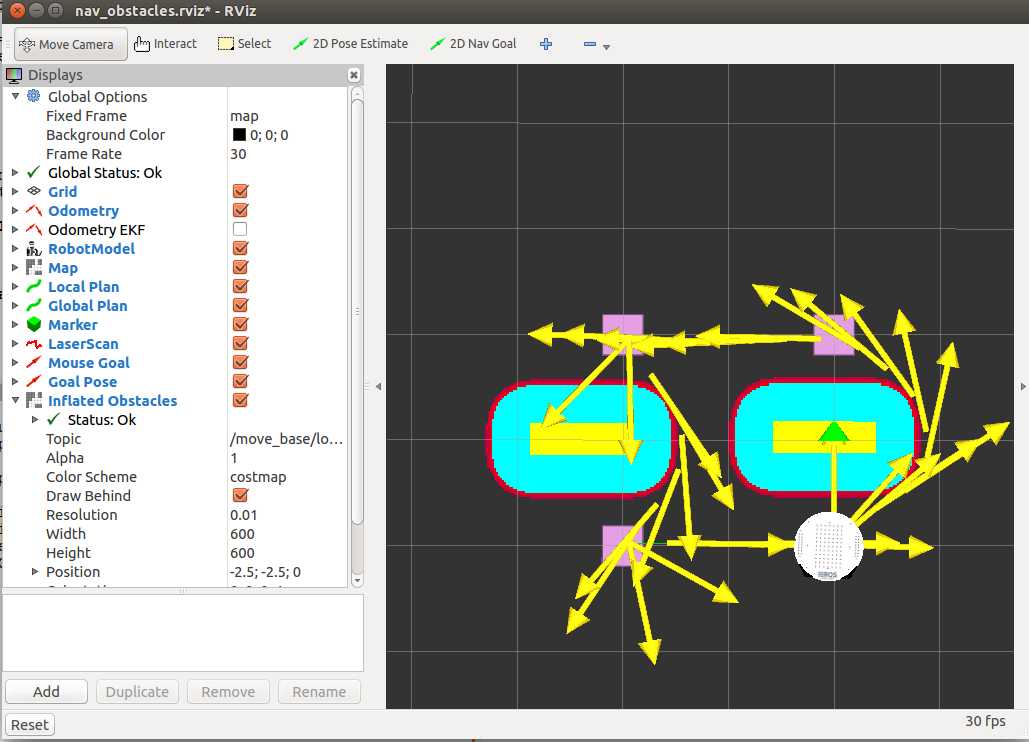
二、避开模拟障碍物
1、
roscore
2、执行
roslaunch rbx1_bringup fake_turtlebot.launch
然后:
rosparam delete /move_base
接着:
roslaunch rbx1_nav fake_move_base_map_with_obstacles.launch
开启rviz:
rosrun rviz rviz -d `rospack find rbx1_nav`/nav_obstacles.rviz
当move_base节点正在运行时,可看到RViz中的障碍物,点击reset按钮刷新显示,然后运行python脚本:
rosrun rbx1_nav move_base_square.py
标签:log 刷新 python 节点 tle 显示 lam src images
原文地址:http://www.cnblogs.com/LQLin168/p/7147430.html