标签:搜索 nbsp log 出队 有向图 参考 为什么 多少 遍历
一、相关定义
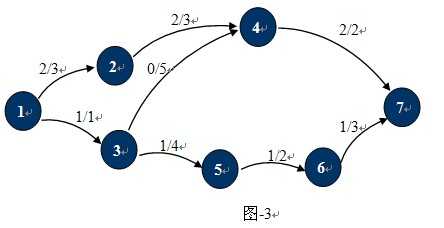
【基本的网络流最大流模型】
模型如图(此图的最大流为1+2=3):(每条有向边上便是“流量/容量”)
【相关定义】
有一网络流如图-4所示:
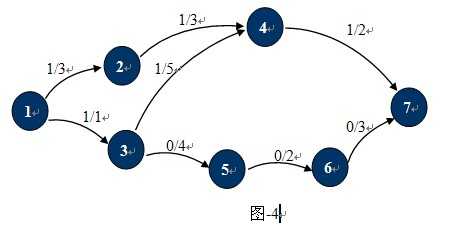
增广路径:从源节点S到汇点T的简单路径。
图-4中的增广路径有:1-2-4-7 和 1-3-4-7
图-4的残余网络如图-5所示:
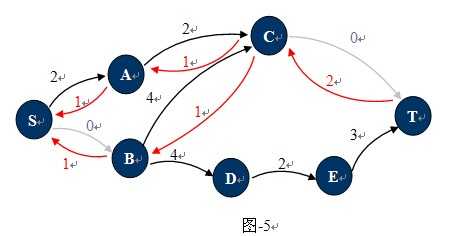
如何变成残余网络:对于已经找到一条从S 到T的路径的网络中,只要在这条路径上,把C(u,v)的值更新为C(u,v)-P(u,v),并且添加反向弧C(v,u)。
提示:此外在未做任何操作之前,原始的有向图也是一个残余网络,它仅仅是未做任何更新而已。
残余网络:给定图G和流量f,残余网络Gf就是由那些仍有空间对流量进行增加的边构成。在流网络中, 若某条边的流量小于其容量, 则将其加入的Gf中;若某条边流量等于其容量,则这条边将不属于Gf(看图-5,有两条这样的边已被标记成灰的,即不属于残余网络)。
增广路径:残存网络Gf中一条从源节点S到汇点T的简单路径。
最大流定理:如果残留网络上找不到增广路径,则当前流为最大流;反之,如果当前流不为最大流,则一定有增广路径。
二、算法实现
Ford-Fulkerson方法
介绍完上面的概念之后,便可以用Ford-Fulkerson方法求最大流了。为什么叫Ford-Fulkerson方法而不是算法,原因在于可以用多种方式实现这一方法,方式并不唯一。
下面介绍一种基于广度优先搜索(BFS)来计算增广路径P的算法:Edmonds-Karp算法。
算法流程如下:
设队列Q:存储当前未访问的节点,队首节点出队后,成为已检查的标点;
Path数组:存储当前已访问过的节点的增广路径;
Flow数组:存储一次BFS遍历之后流的可改进量;
Repeat:
Path清空;
源点S进入Path和Q,Path[S]<-0,Flow[S]<-+∞;
While Q非空 and 汇点T未访问 do
Begin
队首顶点u出对;
For每一条从u出发的弧(u,v) do
If v未访问 and 弧(u,v) 的流量可改进;
Then Flow[v]<-min(Flow[u],c[u][v]) and v入队 and Path[v]<-u;
End while
If(汇点T已访问)
Then 从汇点T沿着Path构造残余网络;
Until 汇点T未被访问
三、沙场练兵
题目一、http://poj.org/problem?id=1273
题解:http://www.cnblogs.com/kuangbin/archive/2011/07/26/2117636.html
四、参考资料
博客:http://blog.csdn.net/yiqingnian28/article/details/23388633
博客:http://www.cnblogs.com/kuangbin/archive/2011/07/26/2117636.html
标签:搜索 nbsp log 出队 有向图 参考 为什么 多少 遍历
原文地址:http://www.cnblogs.com/xzxl/p/7236154.html