标签:sketch figure -o 计算 off png option class idt
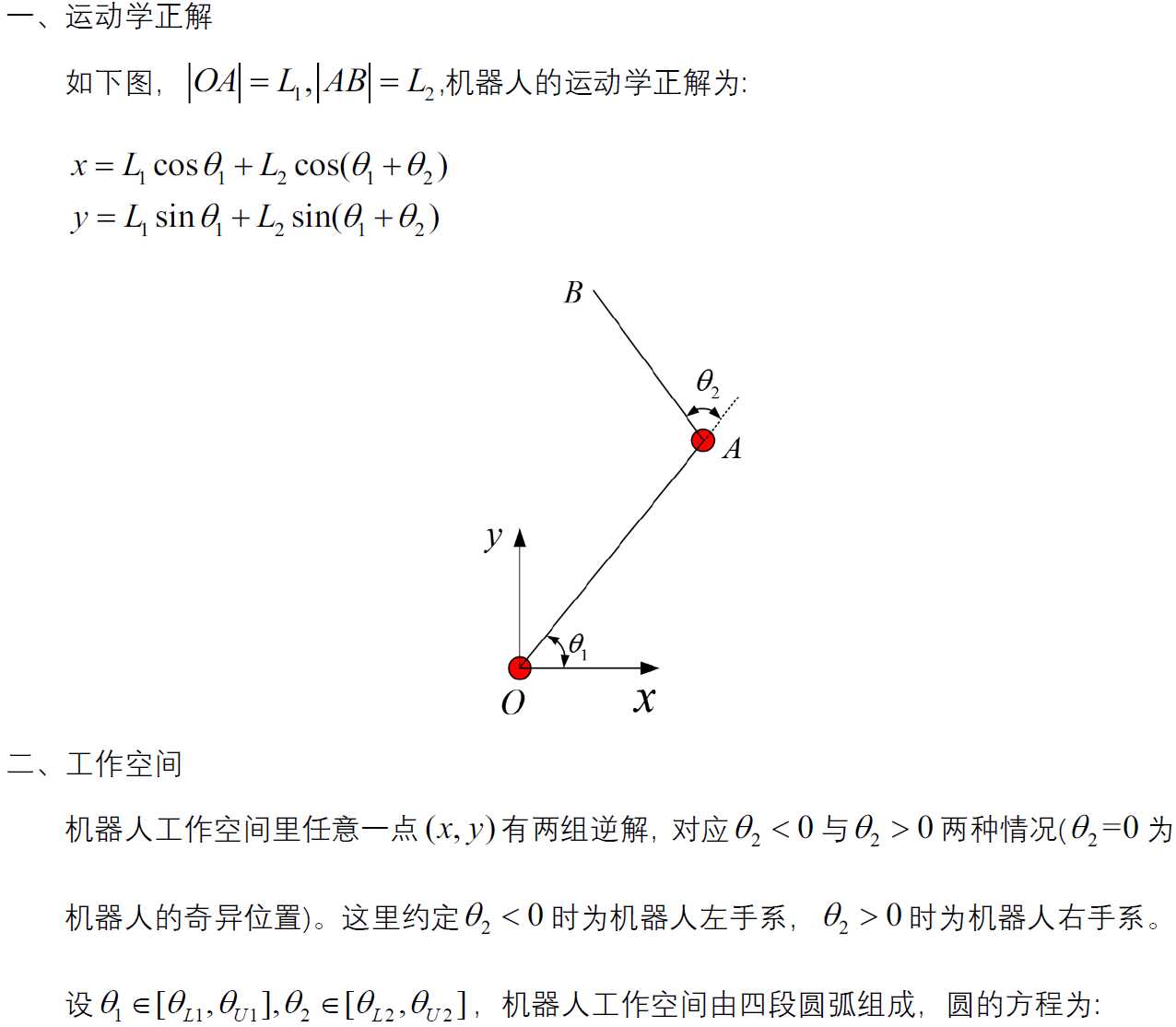
1 %运动学正解 2 function [x, y, c] = planar_robot_forward_kinematics(L1, L2, theta1, theta2) 3 x = L1 * cos(theta1) + L2 * cos(theta1 + theta2); 4 y = L1 * sin(theta1) + L2 * sin(theta1 + theta2); 5 c = theta1 + theta2; 6 end
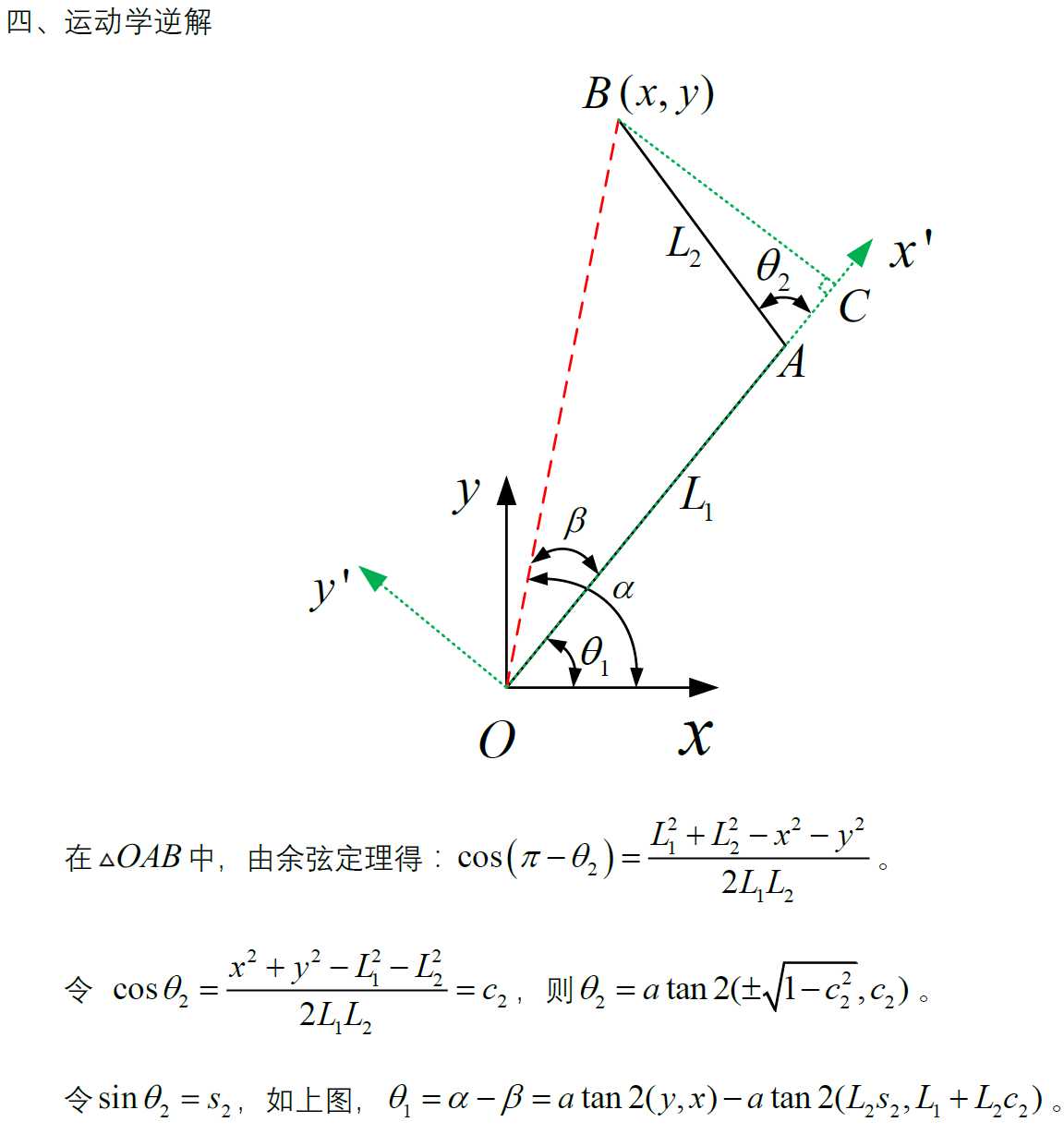
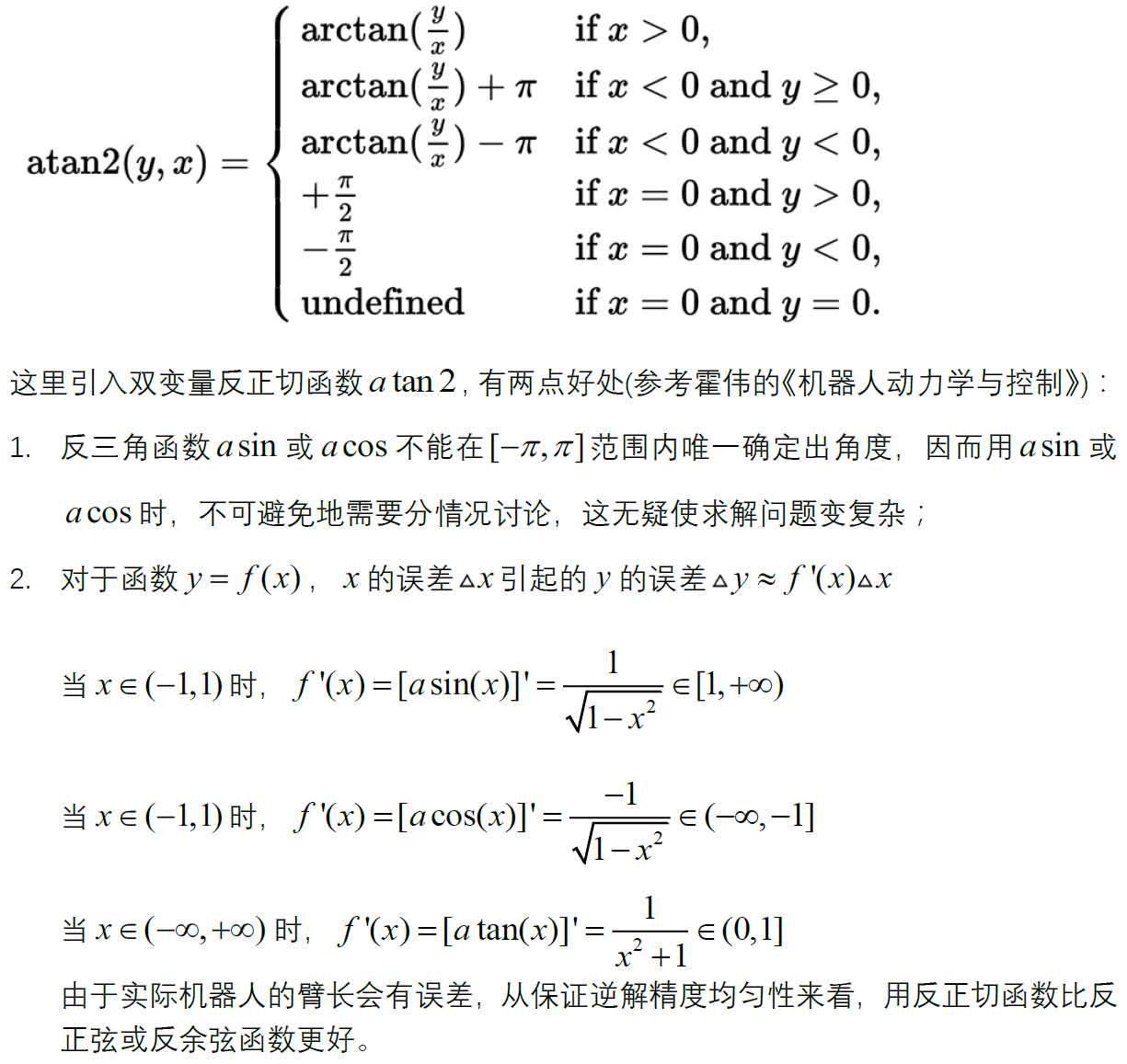
1 %运动学逆解 2 function [theta1, theta2] = planar_robot_inverse_kinematics(L1, L2, x, y, handcoor) 3 c2 = (x^2 + y^2 - L1^2 -L2^2) / (2 * L1 * L2);%若(x,y)在工作空间里,则c2必在[-1,1]里,但由于计算精度,c2的绝对值可能稍微大于1 4 temp = 1 - c2^2; 5 if(temp < 0) 6 temp = 0; 7 end 8 if(handcoor == 0) %right handcoor 9 theta2 = atan2(sqrt(temp), c2); 10 else %left handcoor 11 theta2 = atan2(-sqrt(temp), c2); 12 end 13 s2 = sin(theta2); 14 theta1 = atan2(y, x) - atan2(L2 * s2, L1 + L2 * c2); 15 end
1 %画圆弧 2 function draw_arc(x0, y0, r, theta1, theta2, options) 3 deltaTheta = 0.1 * pi / 180; 4 theta = theta1 : deltaTheta : theta2; 5 x = x0 + r * cos(theta); 6 y = y0 + r * sin(theta); 7 plot(x, y, ‘LineStyle‘, options.LineStyle, ‘Color‘, options.Color, ‘LineWidth‘, options.LineWidth); 8 axis equal; 9 end
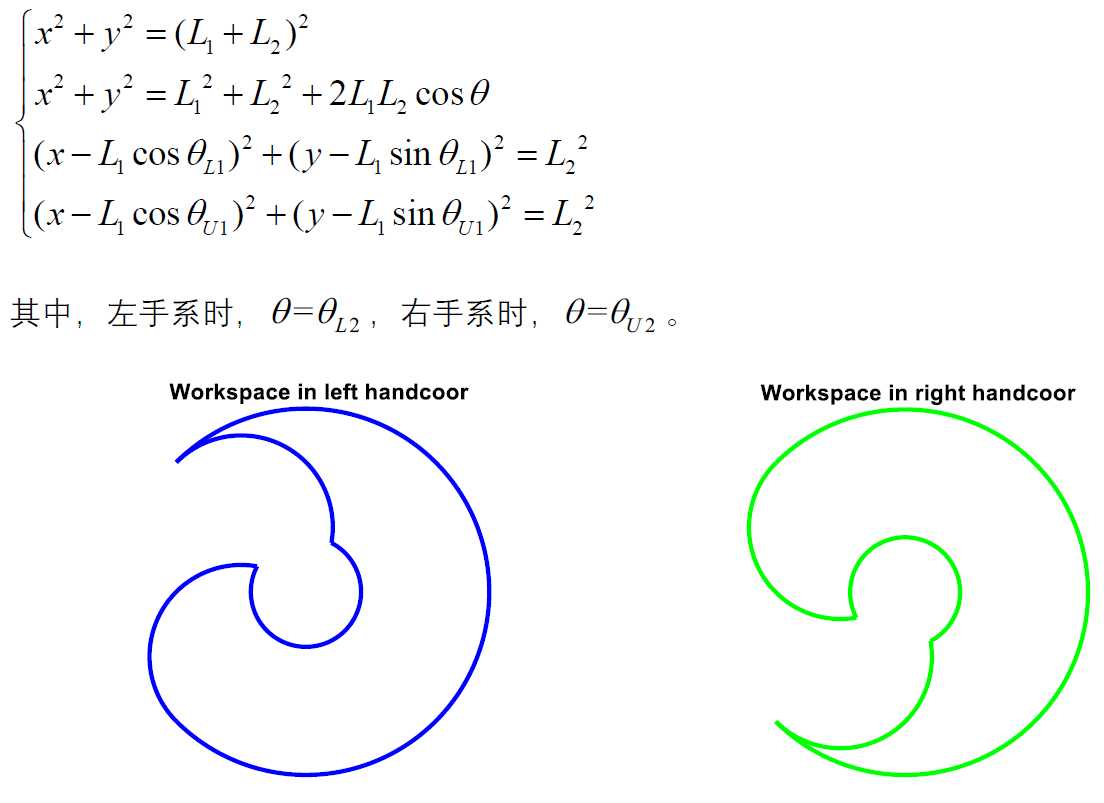
1 %画工作空间 2 function draw_planar_robot_workspace(L1, L2, thetaLimit1, thetaLimit2, handcoor) 3 thetaL1 = thetaLimit1(1); 4 thetaU1 = thetaLimit1(2); 5 thetaL2 = thetaLimit2(1); 6 thetaU2 = thetaLimit2(2); 7 8 hold on; 9 if(handcoor == 0) %right handcoor 10 options.LineStyle = ‘-‘; 11 options.Color=‘g‘; 12 options.LineWidth = 3; 13 14 x0 = 0; 15 y0 = 0; 16 r = sqrt(L1 * L1 + L2 * L2 + 2 * L1 * L2 * cos(thetaU2)); 17 alpha = acos((r^2 + L1^2 - L2^2) / (2 * r * L1)); 18 thetaStart = thetaL1 + alpha; 19 thetaEnd = thetaU1 + alpha; 20 draw_arc(x0, y0, r, thetaStart, thetaEnd, options) 21 22 x0 = 0; 23 y0 = 0; 24 r = L1 + L2; 25 thetaStart = thetaL1; 26 thetaEnd = thetaU1; 27 draw_arc(x0, y0, r, thetaStart, thetaEnd, options) 28 29 x0 = L1 * cos(thetaU1); 30 y0 = L1 * sin(thetaU1); 31 r = L2; 32 thetaStart = thetaU1; 33 thetaEnd = thetaU1 + thetaU2; 34 draw_arc(x0, y0, r, thetaStart, thetaEnd, options); 35 36 x0 = L1 * cos(thetaL1); 37 y0 = L1 * sin(thetaL1); 38 r = L2; 39 thetaStart = thetaL1; 40 thetaEnd = thetaL1 + thetaU2; 41 draw_arc(x0, y0, r, thetaStart, thetaEnd, options); 42 43 title(‘Workspace in right handcoor‘, ‘fontsize‘, 16); 44 else %left handcoor 45 options.LineStyle = ‘-‘; 46 options.Color=‘b‘; 47 options.LineWidth = 3; 48 49 x0 = 0; 50 y0 = 0; 51 r = sqrt(L1 * L1 + L2 * L2 + 2 * L1 * L2 * cos(thetaL2)); 52 alpha = acos((r^2 + L1^2 - L2^2) / (2 * r * L1)); 53 thetaStart = thetaL1 - alpha; 54 thetaEnd = thetaU1 - alpha; 55 draw_arc(x0, y0, r, thetaStart, thetaEnd, options) 56 57 x0 = 0; 58 y0 = 0; 59 r = L1 + L2; 60 thetaStart = thetaL1; 61 thetaEnd = thetaU1; 62 draw_arc(x0, y0, r, thetaStart, thetaEnd, options) 63 64 x0 = L1 * cos(thetaU1); 65 y0 = L1 * sin(thetaU1); 66 r = L2; 67 thetaStart = thetaU1 + thetaL2; 68 thetaEnd = thetaU1; 69 draw_arc(x0, y0, r, thetaStart, thetaEnd, options); 70 71 x0 = L1 * cos(thetaL1); 72 y0 = L1 * sin(thetaL1); 73 r = L2; 74 thetaStart = thetaL1 + thetaL2; 75 thetaEnd = thetaL1; 76 draw_arc(x0, y0, r, thetaStart, thetaEnd, options); 77 title(‘Workspace in left handcoor‘, ‘fontsize‘, 16); 78 end 79 set(gcf, ‘color‘, ‘w‘); 80 axis off; 81 end
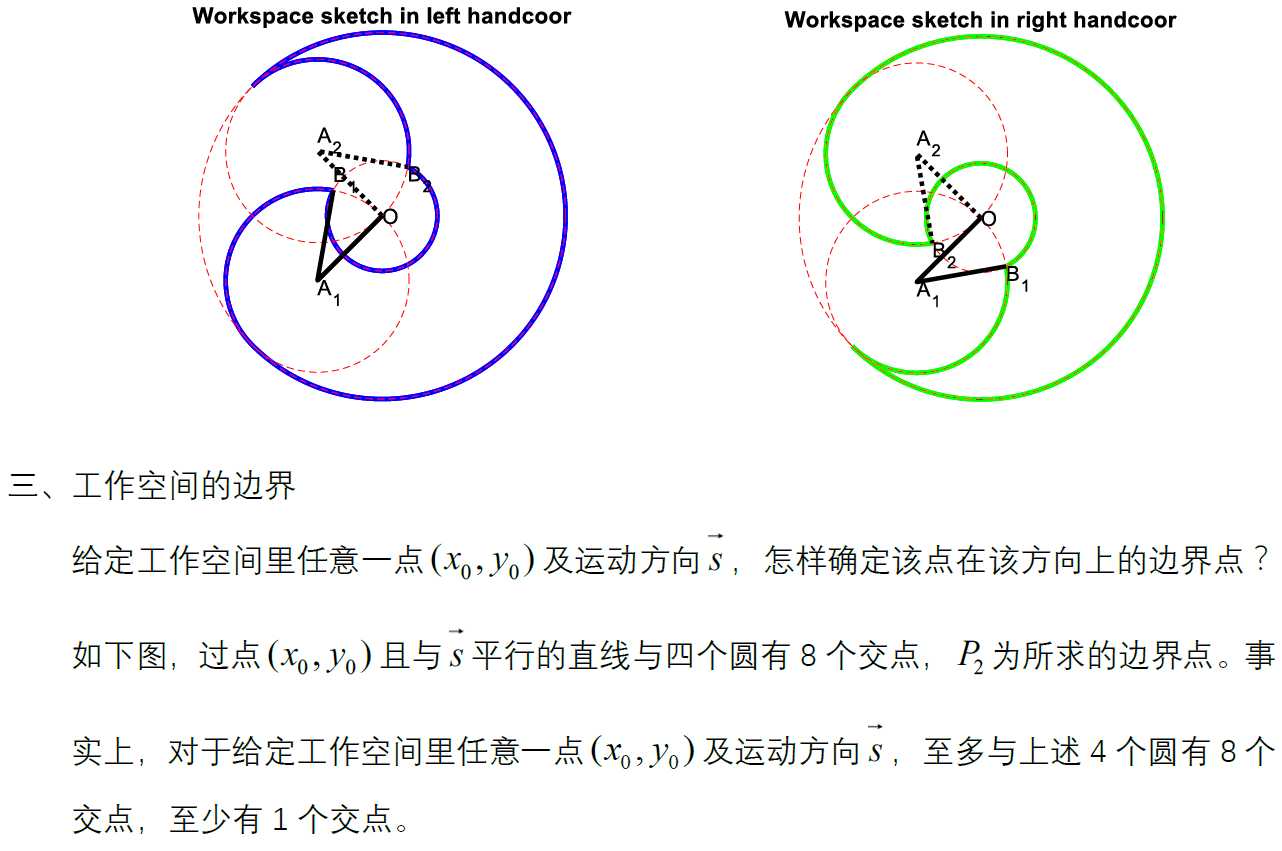
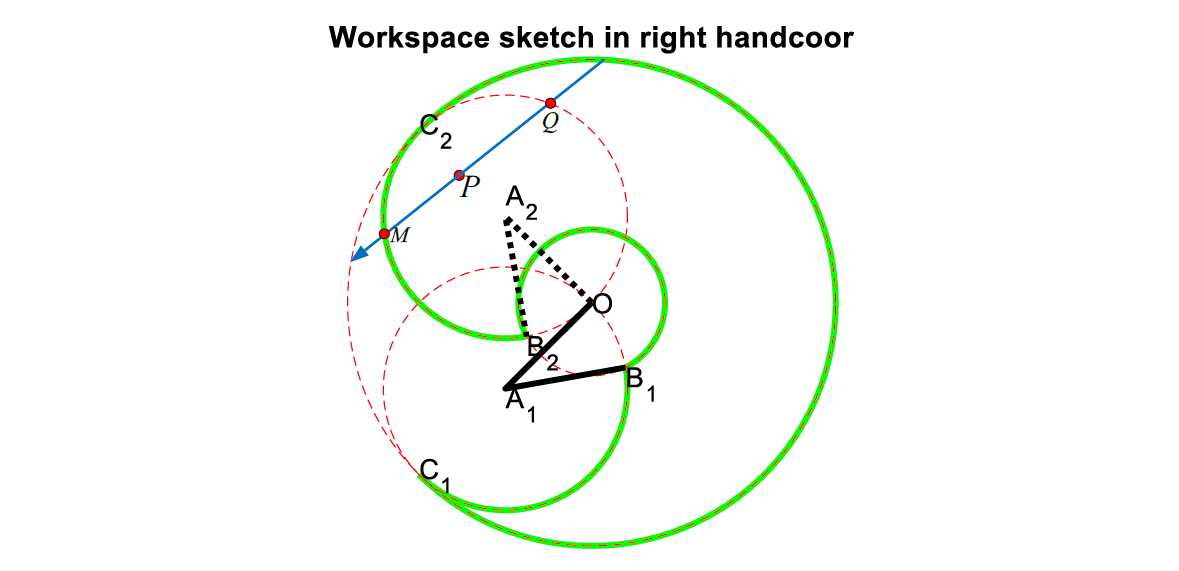
1 %画工作空间草图 2 function draw_planar_robot_workspace_sketch(L1, L2, thetaLimit1, thetaLimit2, handcoor) 3 4 thetaL1 = thetaLimit1(1); 5 thetaU1 = thetaLimit1(2); 6 thetaL2 = thetaLimit2(1); 7 thetaU2 = thetaLimit2(2); 8 9 hold on; 10 if(handcoor == 0) %right handcoor 11 options.LineStyle = ‘-‘; 12 options.Color=‘g‘; 13 options.LineWidth = 3; 14 15 x0 = 0; 16 y0 = 0; 17 r = sqrt(L1 * L1 + L2 * L2 + 2 * L1 * L2 * cos(thetaU2)); 18 alpha = acos((r^2 + L1^2 - L2^2) / (2 * r * L1)); 19 thetaStart = thetaL1 + alpha; 20 thetaEnd = thetaU1 + alpha; 21 draw_arc(x0, y0, r, thetaStart, thetaEnd, options) 22 23 x0 = 0; 24 y0 = 0; 25 r = L1 + L2; 26 thetaStart = thetaL1; 27 thetaEnd = thetaU1; 28 draw_arc(x0, y0, r, thetaStart, thetaEnd, options) 29 30 x0 = L1 * cos(thetaU1); 31 y0 = L1 * sin(thetaU1); 32 r = L2; 33 thetaStart = thetaU1; 34 thetaEnd = thetaU1 + thetaU2; 35 draw_arc(x0, y0, r, thetaStart, thetaEnd, options); 36 37 x0 = L1 * cos(thetaL1); 38 y0 = L1 * sin(thetaL1); 39 r = L2; 40 thetaStart = thetaL1; 41 thetaEnd = thetaL1 + thetaU2; 42 draw_arc(x0, y0, r, thetaStart, thetaEnd, options); 43 44 %------------- 45 options.LineStyle = ‘--‘; 46 options.Color=‘r‘; 47 options.LineWidth = 0.5; 48 49 x0 = 0; 50 y0 = 0; 51 r = sqrt(L1 * L1 + L2 * L2 + 2 * L1 * L2 * cos(thetaU2)); 52 thetaStart = 0; 53 thetaEnd = 2 * pi; 54 draw_arc(x0, y0, r, thetaStart, thetaEnd, options) 55 56 r = L1 + L2; 57 draw_arc(x0, y0, r, thetaStart, thetaEnd, options) 58 59 x0 = L1 * cos(thetaU1); 60 y0 = L1 * sin(thetaU1); 61 r = L2; 62 draw_arc(x0, y0, r, thetaStart, thetaEnd, options); 63 64 x0 = L1 * cos(thetaL1); 65 y0 = L1 * sin(thetaL1); 66 draw_arc(x0, y0, r, thetaStart, thetaEnd, options); 67 68 xA1 = L1 * cos(thetaL1); 69 yA1 = L1 * sin(thetaL1); 70 xB1 = xA1 + L2 * cos(thetaL1 + thetaU2); 71 yB1 = yA1 + L2 * sin(thetaL1 + thetaU2); 72 xA2 = L1 * cos(thetaU1); 73 yA2 = L1 * sin(thetaU1); 74 xB2 = xA2 + L2 * cos(thetaU1 + thetaU2); 75 yB2 = yA2 + L2 * sin(thetaU1 + thetaU2); 76 xC1 = (L1 + L2) * cos(thetaL1); 77 yC1 = (L1 + L2) * sin(thetaL1); 78 xC2 = (L1 + L2) * cos(thetaU1); 79 yC2 = (L1 + L2) * sin(thetaU1); 80 81 plot([0, xA1, xB1], [0, yA1, yB1], ‘lineStyle‘, ‘-‘, ‘color‘, ‘k‘, ‘lineWidth‘, 3); 82 plot([0, xA2, xB2], [0, yA2, yB2], ‘lineStyle‘, ‘:‘, ‘color‘, ‘k‘, ‘lineWidth‘, 3); 83 84 fontsize = 15; 85 delta = 25; 86 text(0, 0, ‘O‘, ‘Fontsize‘, fontsize); 87 text(xA1, yA1 - delta, ‘A_1‘, ‘fontsize‘, fontsize); 88 text(xB1, yB1 - delta, ‘B_1‘, ‘fontsize‘, fontsize); 89 text(xA2, yA2 + delta, ‘A_2‘, ‘fontsize‘, fontsize); 90 text(xB2, yB2 - delta, ‘B_2‘, ‘fontsize‘, fontsize); 91 text(xC1, yC1, ‘C_1‘, ‘fontsize‘, fontsize); 92 text(xC2, yC2, ‘C_2‘, ‘fontsize‘, fontsize); 93 title(‘Workspace sketch in right handcoor‘, ‘fontsize‘, 16); 94 95 else %left handcoor 96 options.LineStyle = ‘-‘; 97 options.Color=‘b‘; 98 options.LineWidth = 3; 99 100 x0 = 0; 101 y0 = 0; 102 r = sqrt(L1 * L1 + L2 * L2 + 2 * L1 * L2 * cos(thetaL2)); 103 alpha = acos((r^2 + L1^2 - L2^2) / (2 * r * L1)); 104 thetaStart = thetaL1 - alpha; 105 thetaEnd = thetaU1 - alpha; 106 draw_arc(x0, y0, r, thetaStart, thetaEnd, options) 107 108 x0 = 0; 109 y0 = 0; 110 r = L1 + L2; 111 thetaStart = thetaL1; 112 thetaEnd = thetaU1; 113 draw_arc(x0, y0, r, thetaStart, thetaEnd, options) 114 115 x0 = L1 * cos(thetaU1); 116 y0 = L1 * sin(thetaU1); 117 r = L2; 118 thetaStart = thetaU1 + thetaL2; 119 thetaEnd = thetaU1; 120 draw_arc(x0, y0, r, thetaStart, thetaEnd, options); 121 122 x0 = L1 * cos(thetaL1); 123 y0 = L1 * sin(thetaL1); 124 r = L2; 125 thetaStart = thetaL1 + thetaL2; 126 thetaEnd = thetaL1; 127 draw_arc(x0, y0, r, thetaStart, thetaEnd, options); 128 129 %------------- 130 options.LineStyle = ‘--‘; 131 options.Color=‘r‘; 132 options.LineWidth = 0.5; 133 134 x0 = 0; 135 y0 = 0; 136 r = sqrt(L1 * L1 + L2 * L2 + 2 * L1 * L2 * cos(thetaL2)); 137 thetaStart = 0; 138 thetaEnd = 2 * pi; 139 draw_arc(x0, y0, r, thetaStart, thetaEnd, options) 140 141 r = L1 + L2; 142 draw_arc(x0, y0, r, thetaStart, thetaEnd, options) 143 144 x0 = L1 * cos(thetaU1); 145 y0 = L1 * sin(thetaU1); 146 r = L2; 147 draw_arc(x0, y0, r, thetaStart, thetaEnd, options); 148 149 x0 = L1 * cos(thetaL1); 150 y0 = L1 * sin(thetaL1); 151 draw_arc(x0, y0, r, thetaStart, thetaEnd, options); 152 153 xA1 = L1 * cos(thetaL1); 154 yA1 = L1 * sin(thetaL1); 155 xB1 = xA1 + L2 * cos(thetaL1 + thetaL2); 156 yB1 = yA1 + L2 * sin(thetaL1 + thetaL2); 157 xA2 = L1 * cos(thetaU1); 158 yA2 = L1 * sin(thetaU1); 159 xB2 = xA2 + L2 * cos(thetaU1 + thetaL2); 160 yB2 = yA2 + L2 * sin(thetaU1 + thetaL2); 161 xC1 = (L1 + L2) * cos(thetaL1); 162 yC1 = (L1 + L2) * sin(thetaL1); 163 xC2 = (L1 + L2) * cos(thetaU1); 164 yC2 = (L1 + L2) * sin(thetaU1); 165 166 plot([0, xA1, xB1], [0, yA1, yB1], ‘lineStyle‘, ‘-‘, ‘color‘, ‘k‘, ‘lineWidth‘, 3); 167 plot([0, xA2, xB2], [0, yA2, yB2], ‘lineStyle‘, ‘:‘, ‘color‘, ‘k‘, ‘lineWidth‘, 3); 168 169 fontsize = 15; 170 delta = 25; 171 text(0, 0, ‘O‘, ‘fontsize‘, fontsize); 172 text(xA1, yA1 - delta, ‘A_1‘, ‘fontsize‘, fontsize); 173 text(xB1, yB1 + delta, ‘B_1‘, ‘fontsize‘, fontsize); 174 text(xA2, yA2 + delta, ‘A_2‘, ‘fontsize‘, fontsize); 175 text(xB2, yB2 - delta, ‘B_2‘, ‘fontsize‘, fontsize); 176 text(xC1, yC1, ‘C_1‘, ‘fontsize‘, fontsize); 177 text(xC2, yC2, ‘C_2‘, ‘fontsize‘, fontsize); 178 title(‘Workspace sketch in left handcoor‘, ‘fontsize‘, 16); 179 end 180 set(gcf, ‘color‘, ‘w‘); 181 axis off; 182 end
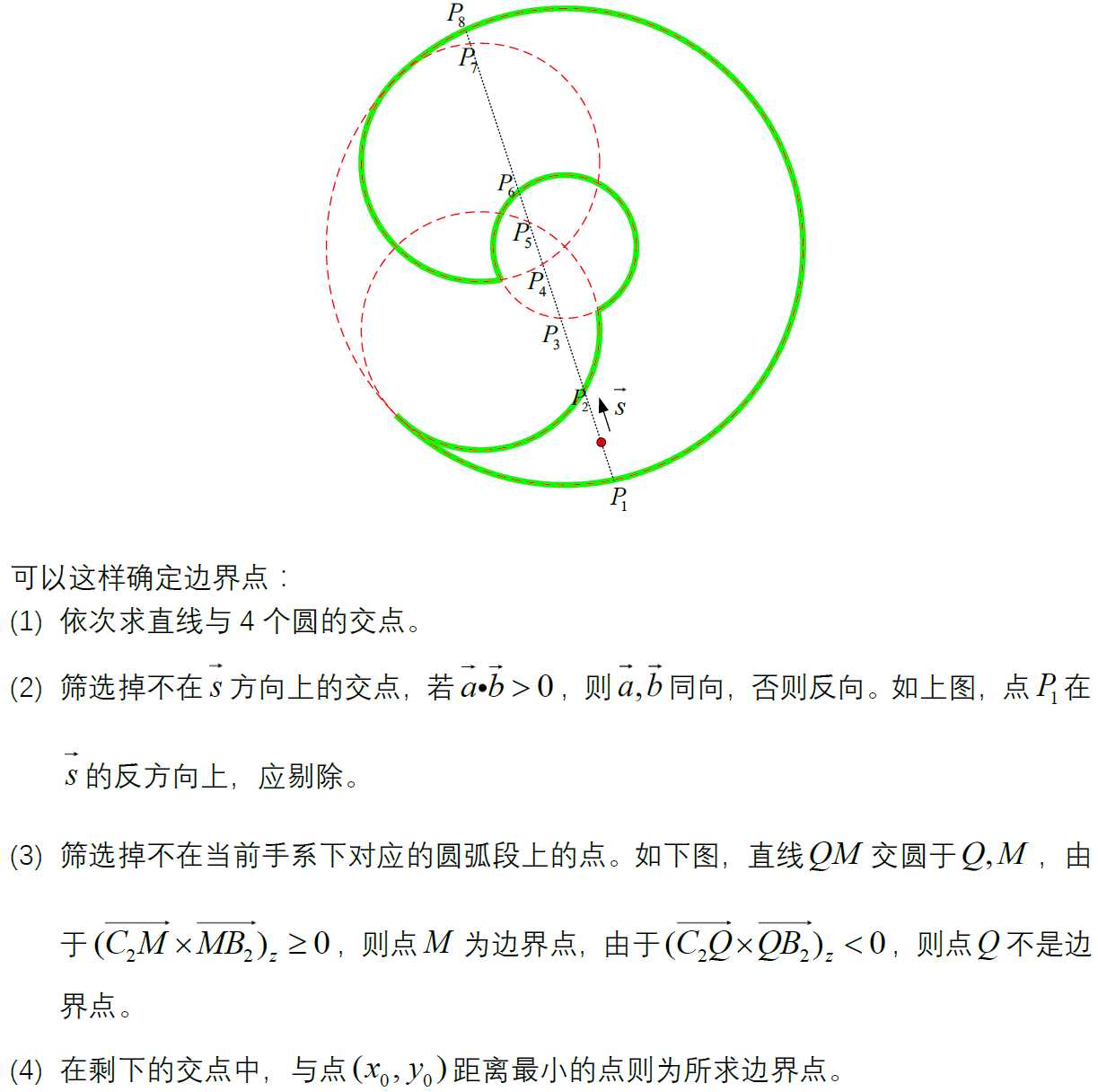
1 %求边界点 2 function p = solve_planar_robot_boundary_point( L1, L2, thetaLimit1, thetaLimit2, handcoor, x0, y0, s) 3 4 thetaL1 = thetaLimit1(1); 5 thetaU1 = thetaLimit1(2); 6 thetaL2 = thetaLimit2(1); 7 thetaU2 = thetaLimit2(2); 8 9 xA1 = L1 * cos(thetaL1); 10 yA1 = L1 * sin(thetaL1); 11 xA2 = L1 * cos(thetaU1); 12 yA2 = L1 * sin(thetaU1); 13 xC1 = (L1 + L2) * cos(thetaL1); 14 yC1 = (L1 + L2) * sin(thetaL1); 15 xC2 = (L1 + L2) * cos(thetaU1); 16 yC2 = (L1 + L2) * sin(thetaU1); 17 18 if(handcoor == 0) %right handcoor 19 r = [sqrt(L1 * L1 + L2 * L2 + 2 * L1 * L2 * cos(thetaU2)), L1 + L2, L2, L2]; 20 xB1 = xA1 + L2 * cos(thetaL1 + thetaU2); 21 yB1 = yA1 + L2 * sin(thetaL1 + thetaU2); 22 xB2 = xA2 + L2 * cos(thetaU1 + thetaU2); 23 yB2 = yA2 + L2 * sin(thetaU1 + thetaU2); 24 pp = [xB1, yB1, xB2, yB2; xC1, yC1, xC2, yC2; xC2, yC2, xB2, yB2; xC1, yC1, xB1, yB1]; 25 else %left handcoor 26 r = [sqrt(L1 * L1 + L2 * L2 + 2 * L1 * L2 * cos(thetaL2)), L1 + L2, L2, L2]; 27 xB1 = xA1 + L2 * cos(thetaL1 + thetaL2); 28 yB1 = yA1 + L2 * sin(thetaL1 + thetaL2); 29 xB2 = xA2 + L2 * cos(thetaU1 + thetaL2); 30 yB2 = yA2 + L2 * sin(thetaU1 + thetaL2); 31 pp = [xB1, yB1, xB2, yB2; xC1, yC1, xC2, yC2; xB2, yB2, xC2, yC2; xB1, yB1, xC1, yC1]; 32 end 33 xc = [0, 0, L1 * cos(thetaU1), L1 * cos(thetaL1)]; 34 yc = [0, 0, L1 * sin(thetaU1), L1 * sin(thetaL1)]; 35 36 p = zeros(8,2); 37 k = 0; 38 if(abs(s(1) - 0) < eps) 39 temp = r.^2 - (x0 - xc).^2; 40 for i = 1 : 4 41 if(temp(i) >= 0) 42 xp1 = x0; 43 yp1 = yc(i) + sqrt(temp(i)); 44 xp2 = x0; 45 yp2 = yc(i) - sqrt(temp(i)); 46 if(dot([xp1 - x0; yp1 - y0], s) > 0 && (pp(i, 3) - xp1) * (pp(i, 2) - yp1) - (pp(i, 1) - xp1) * (pp(i, 4) - yp1) > 0) 47 k = k + 1; 48 p(k, :) = [xp1, yp1]; 49 end 50 if(dot([xp2 - x0; yp2 - y0], s) > 0 && (pp(i, 3) - xp2) * (pp(i, 2) - yp2) - (pp(i, 1) - xp2) * (pp(i, 4) - yp2) > 0) 51 k = k + 1; 52 p(k, :) = [xp2, yp2]; 53 end 54 end 55 end 56 else 57 a = (s(2) / s(1))^2 + 1; 58 b = 2 * (s(2) / s(1)) * (y0 - yc - x0 * (s(2) / s(1))) - 2 * xc; 59 c = xc.^2 - r.^2 - 2 * y0 * yc + y0^2 + yc.^2 + (s(2) / s(1))^2 * x0^2 + 2 * (s(2) / s(1)) * x0 * (yc - y0); 60 delta = b.^2 - 4 * a * c; 61 for i = 1 : 4 62 if(delta(i) >= 0) 63 x = roots([a b(i) c(i)]); 64 xp1 = x(1); 65 yp1 = s(2) / s(1) * (x(1) - x0) + y0; 66 xp2 = x(2); 67 yp2 = s(2) / s(1) * (x(2) - x0) + y0; 68 if(dot([xp1 - x0; yp1 - y0], s) > 0 && (pp(i, 3) - xp1) * (pp(i, 2) - yp1) - (pp(i, 1) - xp1) * (pp(i, 4) - yp1) > 0) 69 k = k + 1; 70 p(k, :) = [xp1, yp1]; 71 end 72 if(dot([xp2 - x0; yp2 - y0], s) > 0 && (pp(i, 3) - xp2) * (pp(i, 2) - yp2) - (pp(i, 1) - xp2) * (pp(i, 4) - yp2) > 0) 73 k = k + 1; 74 p(k, :) = [xp2, yp2]; 75 end 76 end 77 end 78 end 79 80 distance = sqrt((p(1 : k, 1) - x0).^2 + (p(1 : k, 2) - y0).^2); 81 [~, index] = min(distance); 82 p = p(index, :); 83 end
1 %画工作空间(示例) 2 clc; 3 clear; 4 close all; 5 L1 = 200; 6 L2 = 200; 7 thetaLimit1 = [-135, 135] * pi / 180; 8 thetaLimit2 = [-145, 145] * pi / 180; 9 10 figure(1); 11 handcoor = 0; 12 draw_planar_robot_workspace(L1, L2, thetaLimit1, thetaLimit2, handcoor) 13 figure(2); 14 handcoor = 1; 15 draw_planar_robot_workspace(L1, L2, thetaLimit1, thetaLimit2, handcoor) 16 17 figure(3); 18 handcoor = 0; 19 draw_planar_robot_workspace_sketch(L1, L2, thetaLimit1, thetaLimit2, handcoor) 20 figure(4); 21 handcoor = 1; 22 draw_planar_robot_workspace_sketch(L1, L2, thetaLimit1, thetaLimit2, handcoor)
1 %求边界点(示例) 2 clc; 3 clear; 4 close all; 5 L1 = 200; 6 L2 = 200; 7 thetaLimit1 = [-135, 135] * pi / 180; 8 thetaLimit2 = [-145, 145] * pi / 180; 9 10 figure(1); 11 handcoor = 1; 12 draw_planar_robot_workspace(L1, L2, thetaLimit1, thetaLimit2, handcoor); 13 while (1) 14 [x0, y0] = ginput(1); 15 [x1, y1] = ginput(1); 16 s = [x1 - x0; y1 - y0]; 17 p = solve_planar_robot_boundary_point(L1, L2, thetaLimit1, thetaLimit2, handcoor, x0, y0, s); 18 plot([x0, p(1)], [y0, p(2)], ‘--o‘) 19 end
标签:sketch figure -o 计算 off png option class idt
原文地址:http://www.cnblogs.com/gxb31415926/p/7259897.html