标签:种子 信息 解析 pen pascal 根据 存储 这一 相关
这段时间看了不少论文,回头看看,感觉还是有必要将Faster rcnn的源码理解一下,毕竟后来很多方法都和它有相近之处,同时理解该框架也有助于以后自己修改和编写自己的框架。好的开始吧~
这里我们跟着Faster rcnn的训练流程来一步一步梳理,进入tools\train_faster_rcnn_alt_opt.py中:
首先从__main__入口处进入,如下:
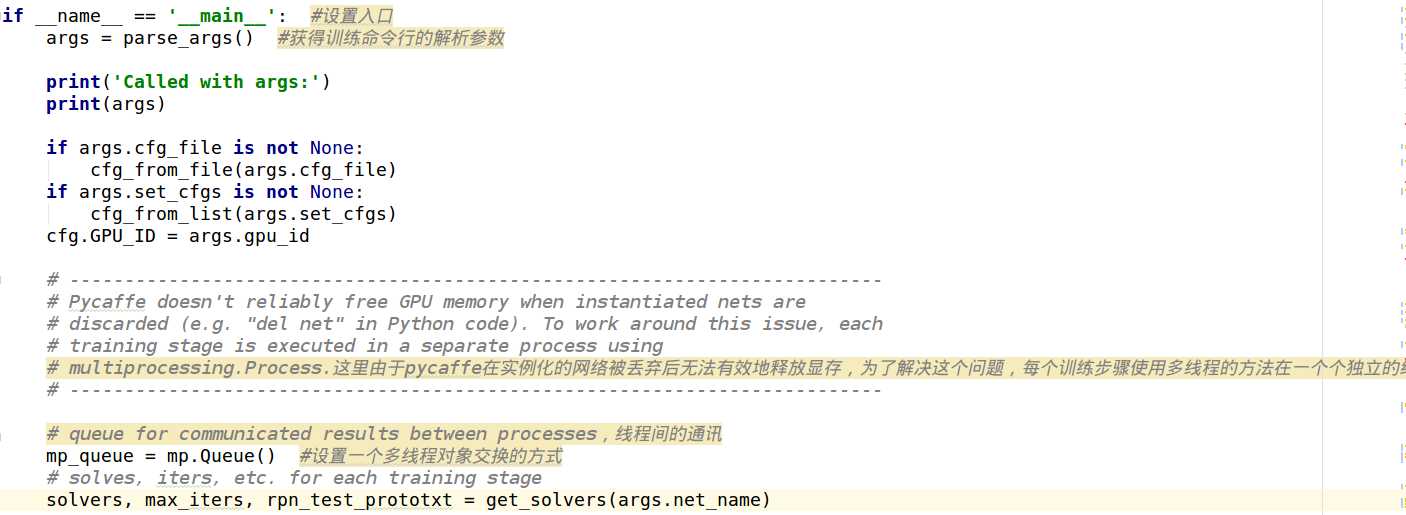
上图中首先对终端中的命令行进行解析,获取相关的命令参数;然后利用mp.Queue()创建一个多线程的对象,再利用get_solvers()获得solvers等信息;然后就开始了论文中的“四步训练”:
第一步,首先训练RPN网络:
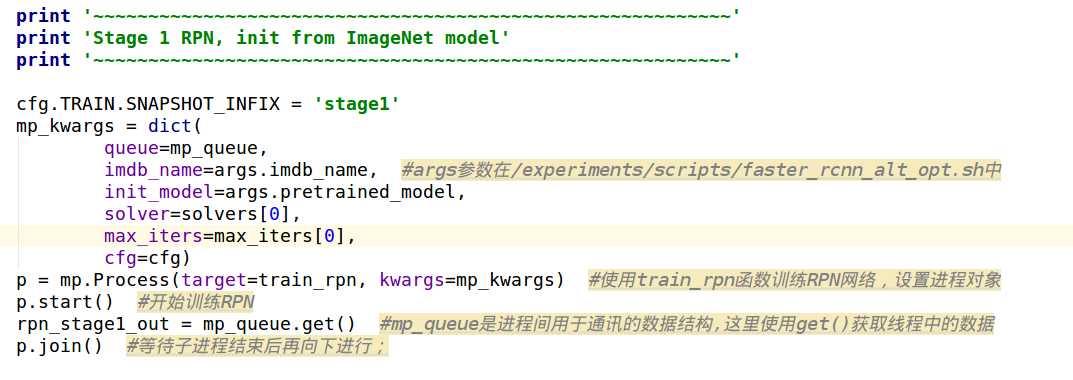
上图中,先开始子进程训练RPN,训练函数是train_rpn(),那么我们就进入这个函数一探究竟:
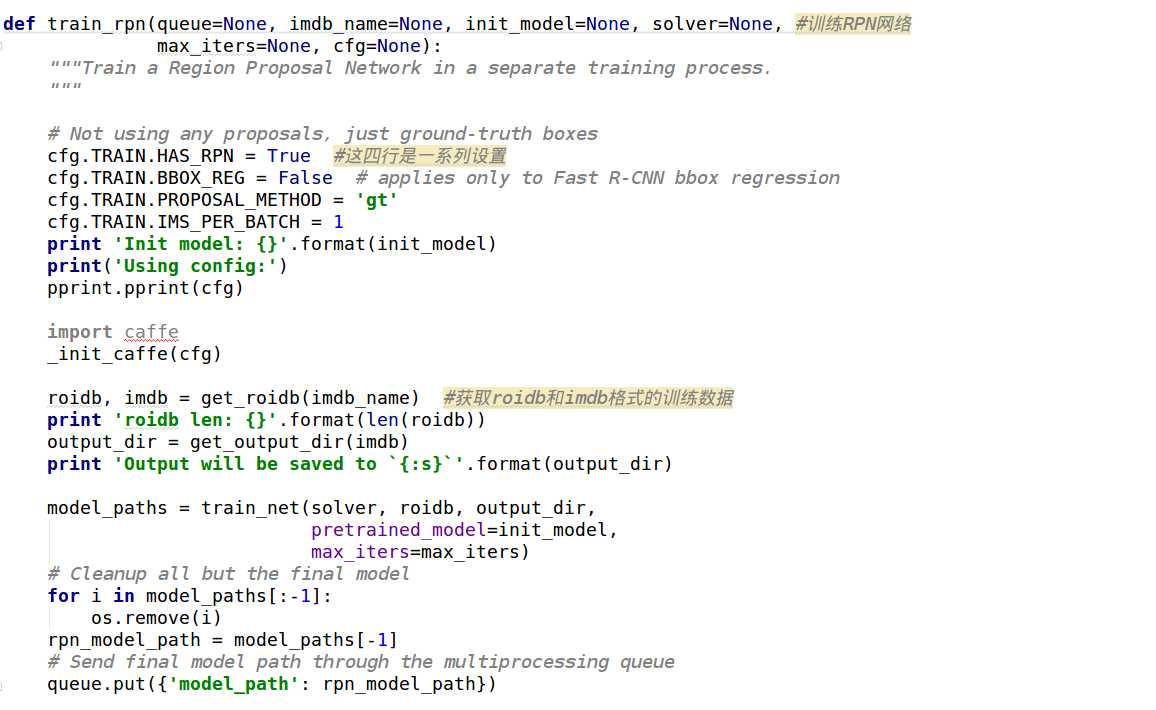
这里首先使用cfg设置训练时的一些设置参数(cfg类是一个字典,其定义在config.py中,属于网络训练时的配置文件),然后是初始化caffe,这里主要是设置了随机数种子,以及使用caffe训练时的模式(gpu/cpu);之后就是第一个重头戏--获取imdb和roidb格式的训练数据:
进入get_roidb()函数,如下:
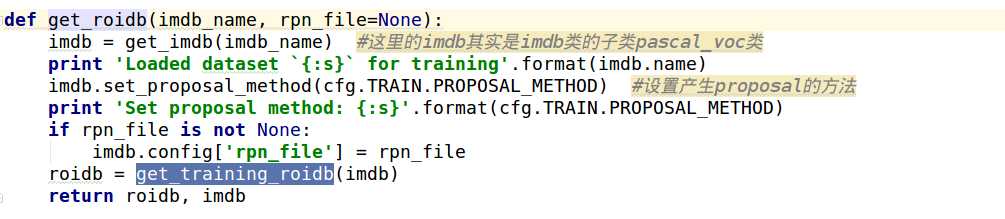
首先通过get_imdb()函数获得imdb数据,那我们就再进入get_imdb()函数一探究竟,如下:
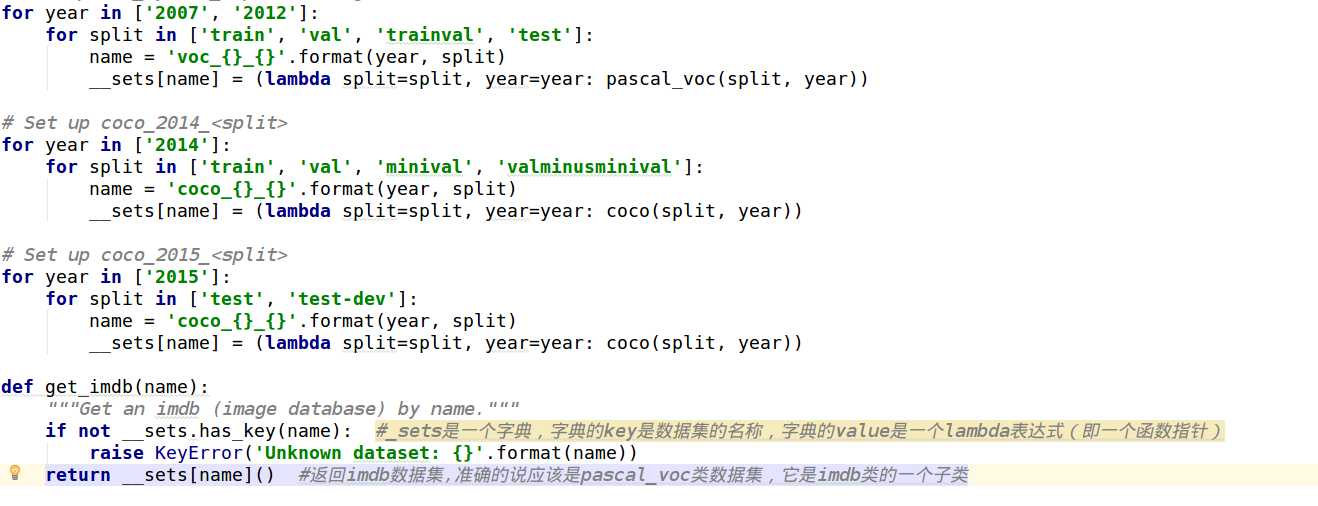
这里其实也是调用了pascal_voc()函数来创建imdb数据,pascal_voc类见pascal_voc.py文件中,如下:
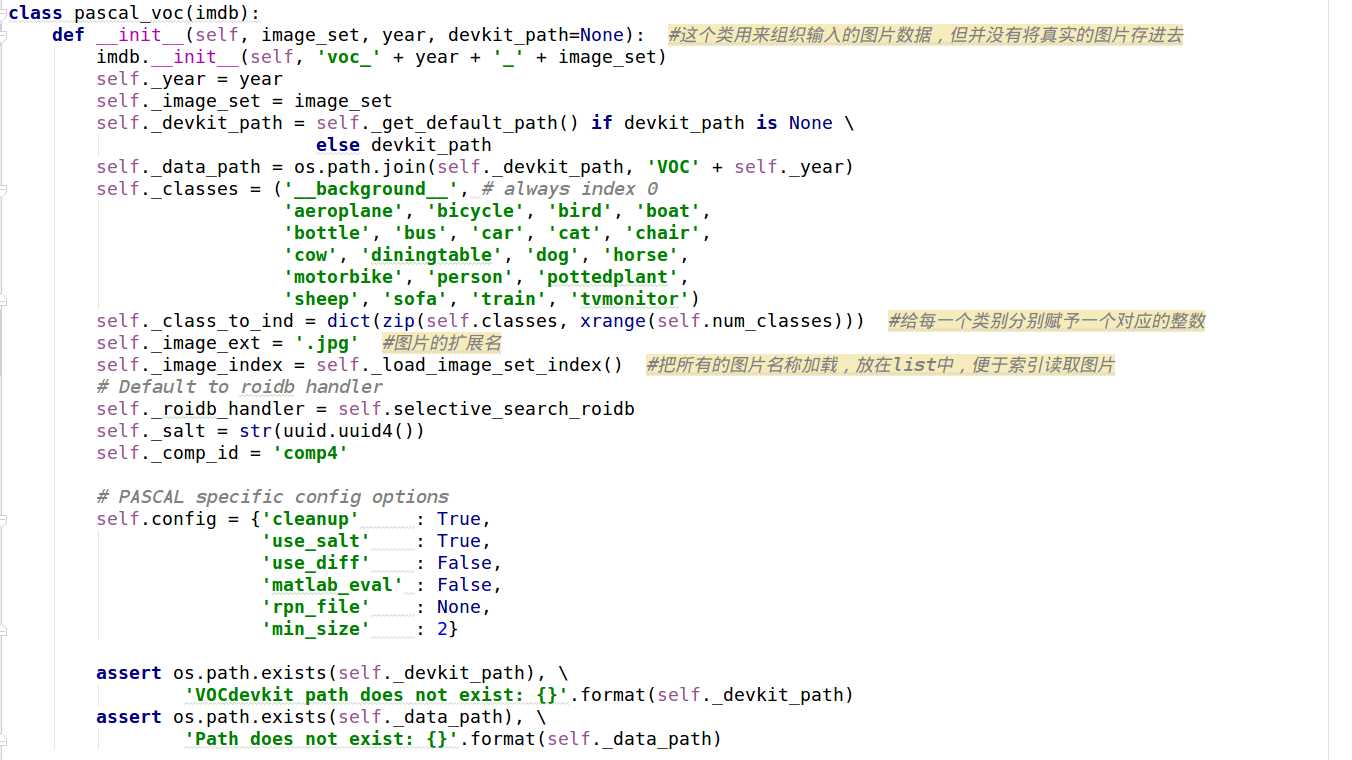
这里只截取了一部分,可以发现,pascal_voc这个类主要用来组织输入的图片数据,存储图片的相关信息,但并不存储图片;而实际上,pascal_voc类是imdb类的一个子类;好了现在imdb数据已经获得了,再回到get_roidb()中,紧接着set_proposal_method()函数设置了产生proposal的方法,实际也是向imdb中添加roidb数据,进入set_proposal_method()这个函数:

首先用eval()对这个方法进行解析,使其有效,再传入roidb_handler中,这里遇到问题1(config.py设置产生proposal的默认方法是selective search,但本论文中应该是使用prn_roidb方法获得候选框的,这是在哪儿修改的???),先进入rpn_roidb()函数中:

首先用gt_roidb()获得gt的roi,进入gt_roidb()函数中:
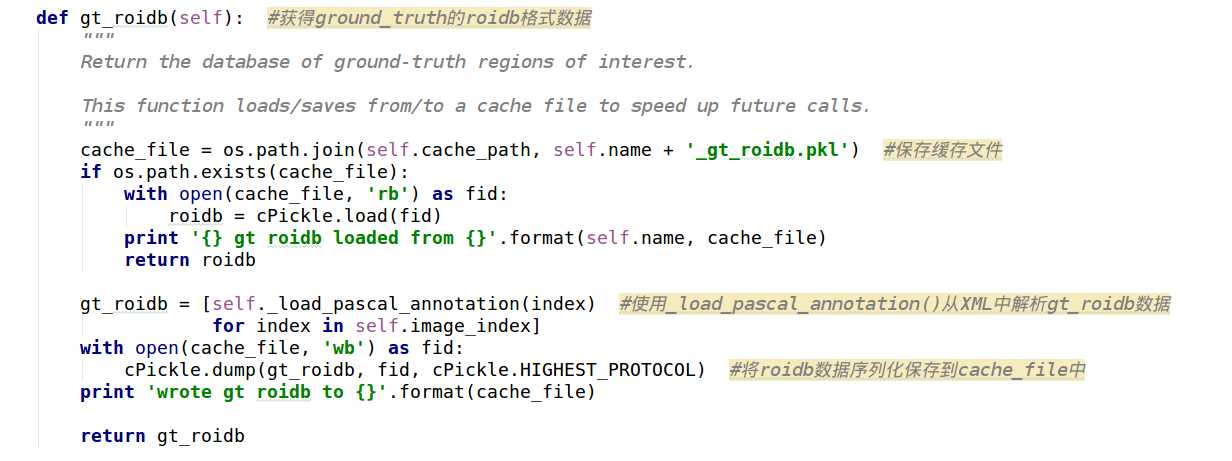
这里gt_roidb()中实际是使用_load_pascal_annotation()通过解析XML文件获得gt的roi的,进入该解析函数:
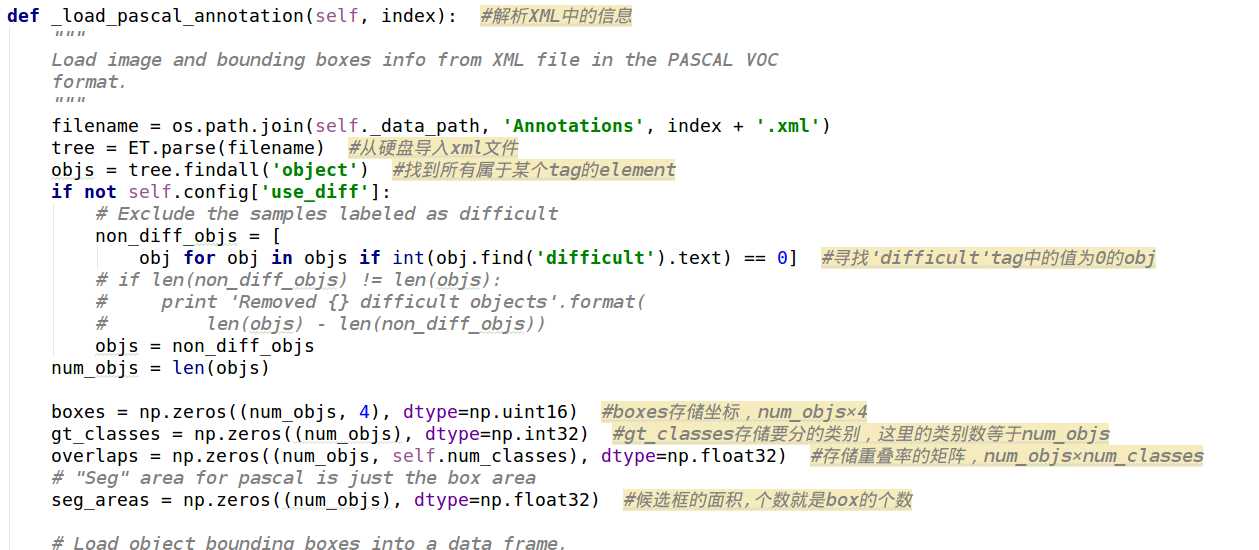
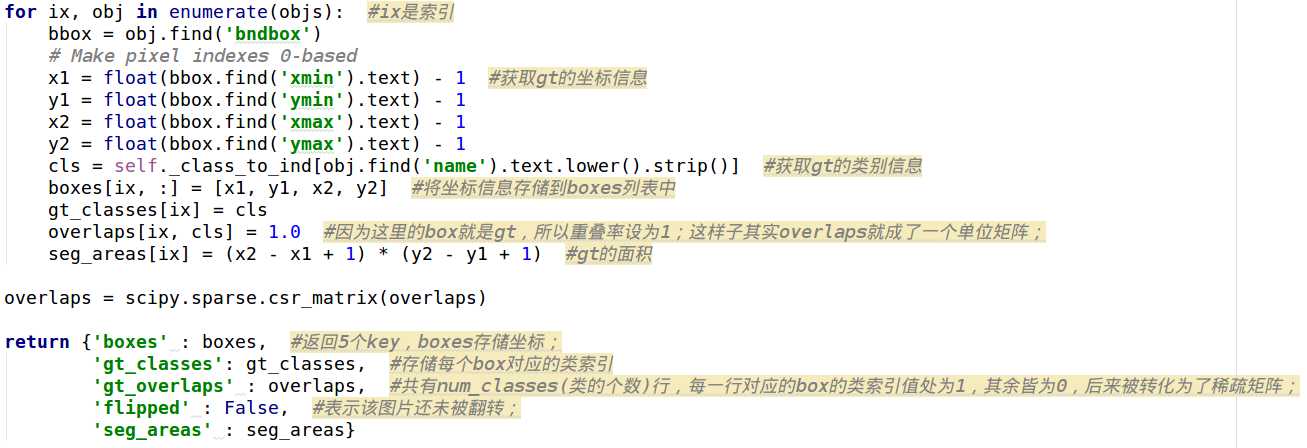
可以发现,roidb的结构是一个包含有5个key的字典,具体值见上面代码~
然后再回到rpn_roidb(),使用_load_rpn_roidb()获得rpn_roidb,进入该函数中:

这里遇到问题2,”fileaname = self.config[‘rpn_file‘]“中的rpn_file默认值是0,后来是在哪儿赋值的???这里是用create_roidb_from_box_list()获得该roidb,进入该函数:
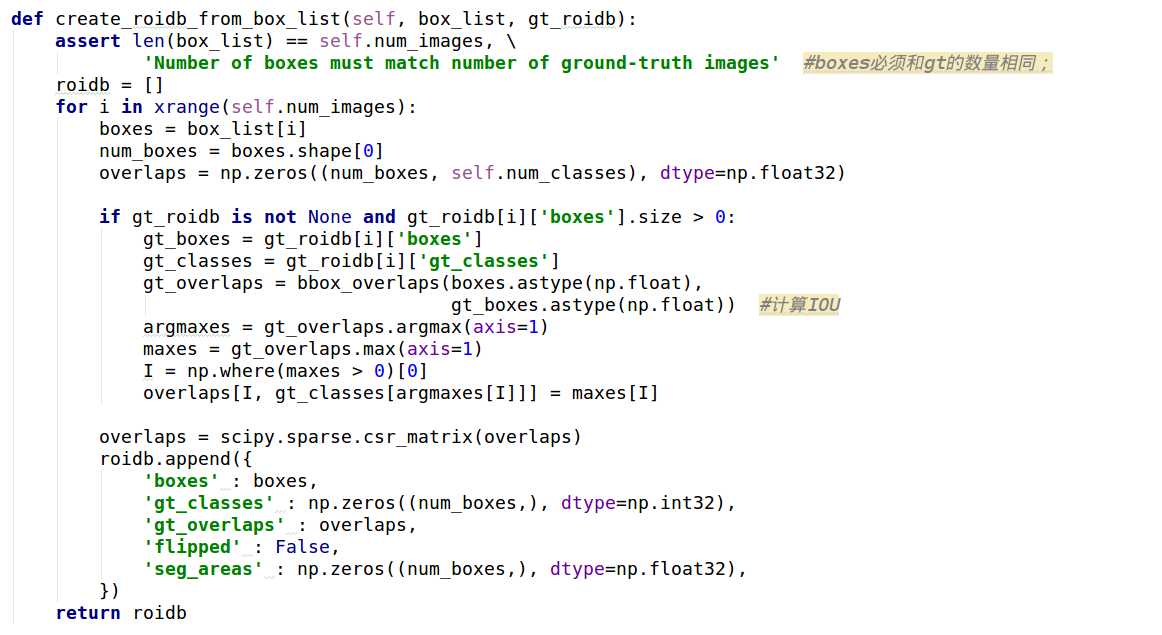
这里遇到问题3:rpn_roidb和gt_roidb有什么不同???
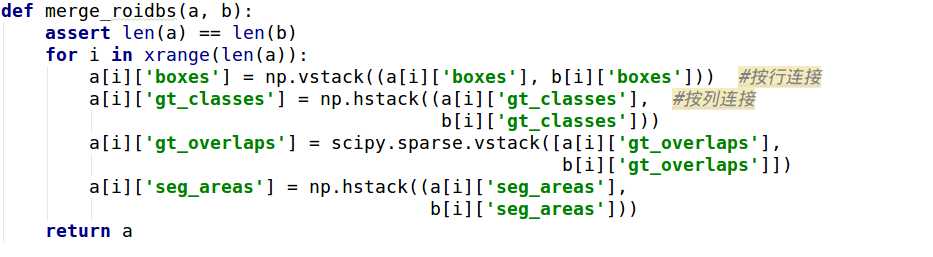
这一切弄好之后再回到rpn_roidb()中执行”roidb = self.merge_roidbs(gt_roidb , rpn_roidb)“将两种roidb进行融合,进入该融合函数:
这个时候就从imdb获得了最初的roidb格式的数据,但这还不是训练时的roidb数据,再回到get_roidb()函数中,通过get_training()函数得到最终用于训练的roidb数据,进入该函数:
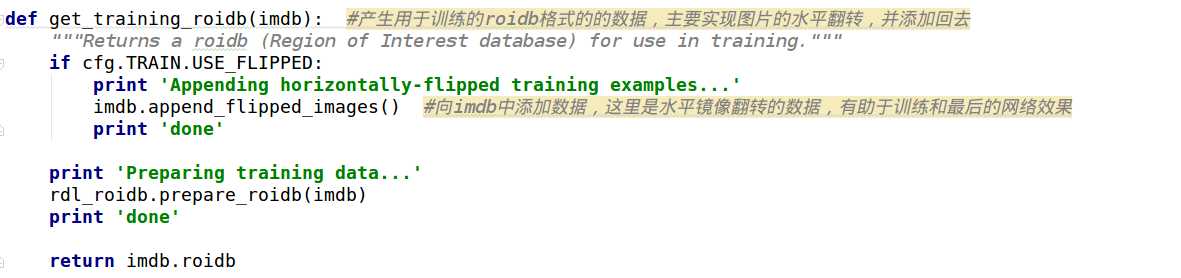
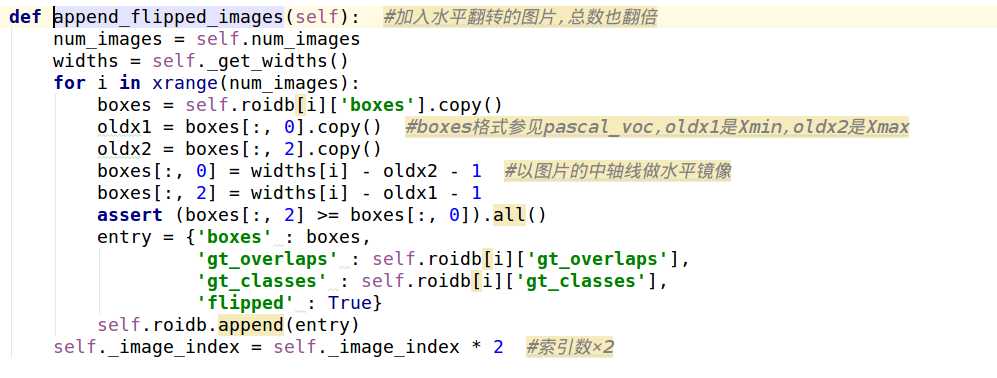
先根据cfg.TRAIN.USE_FLIPPED判断是否需要对roi进行水平镜像翻转(注意这里的镜像的对称轴是图片的中心线),然后使用append_flipped_images()添加镜像roi,作者认为这样子能提高最终网络的训练结果(这应该算是一种简单的数据增强吧),进入该函数:
添加之后还没结束呢,回到get_training_roidb()中,最后还要再经过一步prepare_roidb(),进入该函数:
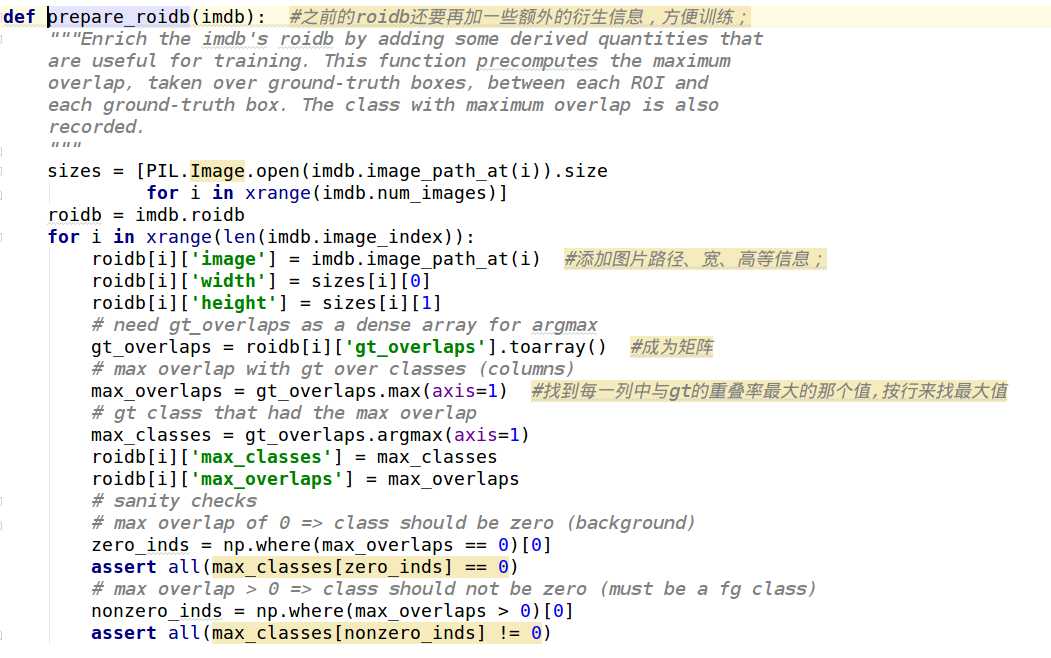
向roidb中再添加一些额外的信息就可以用来进行训练了,好了,到这儿,关于获取roidb和imdb的代码就介绍到这儿了,博文中的三个问题等我弄懂再更新进来,也请各位看官就这三个问题提点建议,歇息~
标签:种子 信息 解析 pen pascal 根据 存储 这一 相关
原文地址:http://www.cnblogs.com/zf-blog/p/7273182.html